
Условие передачи сил позволяет получить высокий коэффициент полезного действия механизма, регулируемый с помощью углов давления.








Угол давления - угол между направлением вектора движущей силы, приложенной к ведомому звену, и вектором скорости точки приложения этой силы. Угол давления q между векторами движущей силы, приложенной к ведомому звену, а именно, это угол между векторами движущей силы F д и её полезной составляющей F¢(рисунок 1.4).
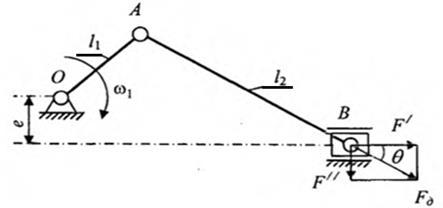
Рисунок 1.4 – Схема сил в КПМ: F д – движущая сила; F¢ - полезная
составляющая движущей силы; F ¢¢ - сила, препятствующая движению
При синтезе рычажных механизмов рекомендуется для рабочих ходов
q < 30°, для холостых ходов q < 45°.
Экстремальные значения углов давления имеют место в тех положениях, когда кривошип перпендикулярен линии движения ползуна (рисунок 1.5).
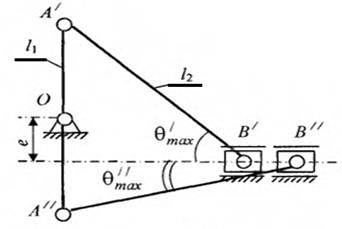
Рисунок 1.5 – Установление экстремальных значений углов давления:
q¢max – угол давления при ближнем положении ползуна; q¢¢max – угол давления при дальнем положении ползуна
Угол q можно уменьшить, увеличивая длину шатуна l2
и влияя на эксцентриситет е . При наличии эксцентриситета максимальные углы давления будут разными при прямом и обратном ходах ползуна:
q¢max =  ; (1.8)
; (1.8)
q¢¢max =  . (1.9)
. (1.9)
При е=0 qmax = 
Коэффициент изменения средней скорости выходного звена . При равномерном вращении кривошипа (рисунок 1.7) время движения ползуна влево ( tx) и вправо ( t p) различное:
tx=  ; (1.10)
; (1.10)
t р =  . (1.11)
. (1.11)
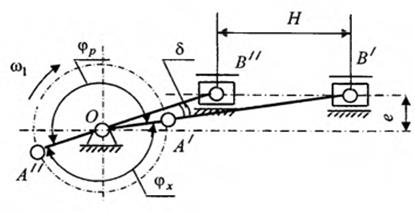
Рисунок 1.6 – Схема к установлению изменения средней скорости
выходного звена: w 1 – угловая скорость кривошипа; j р – угол рабочего хода; j х – угол холостого хода; d - угол перекрытия
Отношение средней скорости выходного звена на обратном холостом и прямом рабочем ходах называют коэффициентом изменения средней скорости выходного звена
k v =  =
=  =
=  (1.12)
(1.12)
или k v=  ; (1.13)
; (1.13)
где d - угол перекрытия, равный d= 180°∙  .
.
Оптимальный подбор геометрических параметров механизма и установление метрических показателей его схемы позволяет получить наиболее приемлемые эксплуатационные характеристики машинного агрегата.
Структурным синтезом механизма называют проектирование структурной схемы по заданным структурным условиям, на которой указывается стойка, подвижные звенья, виды кинематических пар и их взаимное расположение.
Распространение получил метод построения структурной схемы, основанный на присоединении структурных групп Ассура к ведущему звену или основному механизму.
Приложение
(справочное)
Справочные данные
Таблица 1 – Кинематические пары механизмов
| Класс пары | Число условий связей | Название пары, рисунок | Условное обозначение |
| I | 1 | 
| 
|
| II | 2 | 
| 
|
| III | 3 | 
| 
|
| III | 3 | 
| 
|
| IV | 4 | 
| 
|
| IV | 4 | 
| 
|
| V | 5 | 
| 
|
| V | 5 | 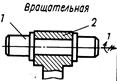
| 
|
| V | 5 | 
| 
|