
Соответствие каждого требования к техническому журналу, будет оценено бинарным(измеримым) критерием, по количеству соответствий максимум балов – 2.








Предполагается, что Журнал технического специалиста по мобильной робототехнике должен включать в себя следующие разделы:
- Раздел технического журнала, посвященный каркасу / конструктивному исполнению = 1 балл.
- Раздел технического журнала, посвященный электропроводке = 1 балл.
- Раздел технического журнала, посвященный управлению движением = 1 балл.
- Раздел технического журнала, посвященный управлению объектом = 1 балла.
- Раздел технического журнала, посвященный программированию = 1 балл
Примечание:
Технический журнал, описывающий робота, должен быть представлен одним документом.
Критерии оценки Раздела технического журнала, посвященного каркасу / конструктивному исполнению.
Судейская оценка, равная 0 баллов, свидетельствует о непоследовательной организации содержания, отсутствии детальных данных и плохом качестве чертежей / схем. Основная стратегия выполнения каркаса/конструкций НЕ представлена очевидным образом в содержимом журнала.
Судейская оценка, равная 1 баллу, свидетельствует о последовательной организации содержания, достаточном количестве детальных данных и приличном качестве чертежей/схем. Основная стратегия выполнения каркаса/конструкций представлена в журнале недостаточно наглядно.
Судейская оценка, равная 2 баллам, свидетельствует о очень хорошей последовательной организации содержания, о более чем достаточном количестве детальных данных и хорошем качестве чертежей/схем. Основная стратегия выполнения каркаса/конструкций представлена очевидным образом в содержимом журнала.
Судейская оценка, равная 3 баллам, свидетельствует об исключительно высокой степени последовательности организации содержания, о превосходном представлении детальных данных и об отличном качестве чертежей/схем. Основная стратегия выполнения каркаса/конструкций исключительно наглядно представлена в содержимом журнала.
Критерии оценки раздела технического журнала, посвященного электропроводке:
Судейская оценка, равная 0 баллов, свидетельствует о непоследовательной организации содержания, отсутствии детальных данных и плохом качестве общих схем/ принципиальных схем. Соответствие отраслевым стандартам на проводку НЕ очевидно из содержимого журнала.
Судейская оценка, равная 1 баллу, свидетельствует о последовательной организации содержания, достаточном количестве детальных данных и приличном качестве общих схем/ принципиальных схем. Соответствие отраслевым стандартам на проводку достаточно очевидно из содержимого журнала.
Судейская оценка, равная 2 баллам, свидетельствует о очень хорошей последовательной организации содержания, о более чем достаточном количестве детальных данных и хорошем качестве общих схем/ принципиальных схем. Соответствие отраслевым стандартам на проводку весьма очевидно из содержимого журнала.
Судейская оценка, равная 3 баллам, свидетельствует об исключительно высокой степени последовательности организации содержания, о превосходном представлении детальных данных и об отличном качестве общих схем/ принципиальных схем. Соответствие отраслевым стандартам на проводку исключительно очевидно из содержимого журнала.
Критерии оценки раздела технического журнала, посвященного управлению движением:
Судейская оценка, равная 0 баллов, свидетельствует о непоследовательной организации содержания, отсутствии детальных данных и плохом качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления мобильностью НЕ представлена очевидным образом журнале.
Судейская оценка, равная 1 баллу, свидетельствует о последовательной организации содержания, достаточном количестве детальных данных и приличном качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления мобильностью, достаточно очевидны в журнале.
Судейская оценка, равная 2 баллам, свидетельствует о очень хорошей последовательной организации содержания, о более чем достаточном количестве детальных данных и хорошем качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления мобильностью, более чем очевидны в журнале.
Судейская оценка, равная 3 баллам, свидетельствует об исключительно высокой степени последовательности организации содержания, о превосходном представлении детальных данных и об отличном качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления мобильностью, представлены исключительно очевидным образом в журнале.
Критерии оценки раздела технического журнала, посвященного управлению объектом:
Судейская оценка, равная 0 баллов, свидетельствует о непоследовательной организации содержания, отсутствии детальных данных и плохом качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система работы с объектами, НЕ представлены очевидным образом в журнале.
Судейская оценка, равная 1 баллу, свидетельствует о последовательной организации содержания, достаточном количестве детальных данных и приличном качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления объектами, достаточно очевидны в журнале.
Судейская оценка, равная 2 баллам, свидетельствует о очень хорошей последовательной организации содержания, о более чем достаточном количестве детальных данных и хорошем качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления объектам, более чем очевидны в журнале.
Судейская оценка, равная 3 баллам, свидетельствует об исключительно высокой степени последовательности организации содержания, о превосходном представлении детальных данных и об отличном качестве чертежей/схем. Основная стратегия и функциональные элементы, на которых основана система управления объектами, представлены в журнале исключительно очевидным образом.
Критерии оценки раздела технического журнала, посвященного программированию:
Судейская оценка, равная 0 баллов, свидетельствует о непоследовательной организации содержания, отсутствии блок схем и примеров программного кода. Основной алгоритм программы и её элементы, на которых основана программа, НЕ представлены очевидным образом в журнале.
Судейская оценка, равная 1 баллу, свидетельствует о последовательной организации содержания, достаточном количестве блок схем и примеров программного кода. Основной алгоритм программы и её элементы, на которых основана программа, достаточно очевидны в журнале.
Судейская оценка, равная 2 баллам, свидетельствует о очень хорошей последовательной организации содержания, о более чем достаточном количестве блок схем и примеров программного кода. Основной алгоритм программы и её элементы, на которых основана программа, более чем очевидны в журнале.
Судейская оценка, равная 3 баллам, свидетельствует об исключительно высокой степени последовательности организации содержания, о превосходном представлении блок схем и примеров программного кода. Основной алгоритм программы и её элементы, на которых основана программа, представлены в журнале исключительно очевидным образом.
Особенности выполнения задания.
Журнал описывающий робота участники должны предоставить экспертам на проверку в день чемпионата C1. Участники должны предоставить документ в формате PDF назвав следующим образом:
1) Журнал, описывающий робота:
Робот_(регион команды)_(Фамилии обоих участников)16+.pdf
Например, для команды из Уфы, с участниками с фамилиями Иванов и Сидоров название файлов журналов должно быть следующим:
Робот_Республика_Башкортостан_Иванов_Сидоров_16+.pdf
Возможные ошибки.
· Не предоставление журнала в срок, оговоренный в конкурсном задании или на брифинге
· Превышение суммарно-допустимого количества страниц журнала
· Описание не всех Разделов журнала
· Неправильное наименование журнала
Модуль C : Базовые действия.
Данный модуль включает в себя выполнение отдельных элементов конкурсного задания в автономном режиме. Конкурсанты должны принять участие в выполнении оцениваемых конкурсных заданий в течение конкурсных дней. Модуль разделяется на субкритерии С1, С2. В данном модуле участникам необходимо продемонстрировать способность робота выполнять простые действия в автономном режиме.
Алгоритм работы.
Выполнение С1 (Основные движения робота / характеристики системы распознавания и ориентации робота в конкурсной среде в автономном режиме, когда назначенные объекты / пункты назначения ИЗВЕСТНЫ заранее):
| Распознавание желтого куба при помощи камеры. | Желтый кубик (Hazmat) помещается в поле зрения камеры, робот должен выполнить заранее определенный ответ, например, включить зеленую индикацию или вернуться назад (выбор остается за конкурсантами). |
| Распознавание синего куба при помощи камеры. | Синий медицинский кубик помещается в поле зрения камеры, робот должен выполнить заранее определенный ответ, например, включить зеленую индикацию или вернуться назад (выбор остается за конкурсантами). |
| Камера / датчик распознавания препятствия на каталке | Каталка (препятствие) помещается на пути движущегося робота, и он должен остановиться и вернуться назад (робот может двигаться в любом месте площадки). |
| Базовое движение робота и вращение на 540 и более градусов в пределах круга 650 мм | Робот будет размещен перед контейнером для опасных веществ и должен будет вернуться в стартовую зону, а затем на санитарную зону и повернуться на 540 и более градусов. Робот должен совершить поворот, оставаясь колесной базой в круге дезинфекции. |
| Основные движения роботов в больничной среде | Робот будет размещен в домашней зоне и должен будет переместиться в назначенную комнату пациента (например, Комната пациента 5). Робот должен полностью находиться в палате пациента. |
| Преодоление препятствий | Робот будет размещен перед назначенным каталкой и должен будет перейти в назначенную палату пациента, избегая каталок (например, стартовое место в палате пациента 4, перед каталкой 4, робот должен перейти в палату пациента 5). Робот должен полностью находиться внутри палаты пациента и не может перемещать каталку. |
Выполнение С2 (Основные движения робота / характеристики системы управления объектом в автономном режиме, когда назначенные объекты / пункты назначения ИЗВЕСТНЫ заранее:
| Управление кубом 1 | Робот будет размещен рядом с диспансерными полками, и ему потребуется взять назначенный куб с назначенной полки. Куб должен оставаться во владении робота не менее 5 секунд. |
| Управление кубом 2 | Робот должен въехать в назначенную комнату пациента, со стартовой зоны и обнаружить куб с опасным элементом. Если куб с опасным элементом (HazMat) отсутствует, робот должен отобразить это на фронтальной панели. Если куб присутствует, то робот должен захватить данный куб. Наличие куба определяется жеребьевкой. Робот должен выполнить только 1 действие – захватить куб или вывести информацию о его отсутствии. |
| Управление кубом 3 | Робот будет размещен в проходе за пределами комнаты для пациентов, у него есть куб, и он должен переместиться в палату пациента и поместить куб на уже стоящий куб, который уже находится на назначенной подставке (участники выбирают кубики и комнату). При старте куб находится во владении робота |
| Доставка неизвестного куба в неизвестную комнату | Робот будет размещен на старте , необходимо подъехать к диспансерным полкам взять и доставить куб в заданную палату. |
| Доставка желтого куба в зону выгрузки | Робот будет размещен на старте , необходимо подъехать в заданную палату забрать желтый куб, выгрузить и провести дезинфекцию. |
| Управление информацией и отчетность | Робот должен будет продемонстрировать способность распознавания доски заказов и отправить текстовый отчет (строку) обратно на шаффлборд (передняя панель) на главном компьютере участника. |
На протяжении выполнения конкурсного задания робот должен сообщать находящимся вокруг людям о текущем состоянии выполнения задачи посредством световой индикации. Ожидается, что участники расположат индикационные лампы таким образом, что их будет хорошо видно с любой стороны соревновательного поля.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Робот выполняет задачу (находится на поле опасно) | Робот завершил выполнение задачи (находится на поле безопасно) |
Описание индикации
| Состояние лампы | Красная лампа не горит | Красная лампа горит | Зелёная лампа не горит | Зелёная лампа горит |
| Условное обозначение |
Примечание: Если роботу необходимо продемонстрировать реакцию на действие посредство индикации, то сделать это можно следующим образом.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Красная лампочка мигает с периодичностью в 1 секунду(секунду горит, секунду не горит) Робот выполняет задачу (находится на поле опасно) | Красная лампочка мигает с периодичностью в 1 секунду (секунду горит, секунду не горит), зеленая лампочка загорается. Робот демонстрирует индикацию, на внешние условия. | Робот завершил выполнение задачи (находится на поле безопасно) |
Особенности выполнения задания.
Примечание к модулю С:
1) Задача считается выполненной, совершил требуемое действие в соответствии с индикацией.
2) Участникам разрешена коммуникация.
3) Запрещено использовать изображение с USB камеры
Возможные ошибки.
· Не правильно выполненное действие
· Не правильно распознанная шайба
Модуль D : Оценка робота
Оценка робота будет производиться по следующим критериям:
• Каркас
• Система манипулирования объектами
• Электропроводка
Алгоритм работы.
В день С-1 участники после прибытия на площадку и ознакомления с рабочими местами в соответствии с графиками. При проектировании, подготовке, и сборке робота участники должны собрать робота таким образом, чтобы он удовлетворял стандартам качества по трём основным направлениям: Каркас, Система манипулирования объектами и электропроводка.
Особенности выполнения задания.
В день С1 участников предупредят о времени проверки робота. Перед проверкой робота участники должны расположить роботов на своих рабочих местах на подставках, которые не должны создавать проблем для оценивающей группы экспертов. Оценка роботов проводится без присутствия участников, поэтому перед тем, как участники покинут площадку группа экспертов ответственная за оценку роботов проведёт инспекцию, и в случае, если на роботе участников, установлены элементы, которые препятствуют оценке робота, участников попросят их снять. Для приведения робота в рабочее состояние участникам будет дано дополнительное время на следующий соревновательный день.
Возможные ошибки.
· Использование запрещенных элементов при сборке робота
· Превышение допустимого количества элементов
· Конструкция робота не удовлетворяет технике безопасности (не установлена кнопка экстренной остановки, отсутствуют предохранители после аккумуляторной батареи и т.д.)
Модуль E : Программирование, тестирование и регулировка
Включает в себя выполнение заезда в автономном режиме и в режиме телеуправления с заранее известным заказом. Конкурсанты должны принять участие в выполнении двух оцениваемых конкурсных заданий в течение конкурсного дня. Модуль разделяться на суб-критерии E1, E2, E3, E4.
Алгоритм работы.
Выполнение Е1, E2 (Автономный режим):
Робот устанавливается в зону старта. После начала заезда робот должен в автономном режиме доставить заранее известные заказы. По окончанию выполнения задания робот должен переместиться в зону финиша. Задание считается полностью выполненным если в конце заезда колёсная база робота находится в рамках зоны финиша, все заказы расположены верно, световая индикация полностью соответствовала указанной. На выполнение задания отводится 10 минут. По истечении этого времени дальнейшие действия робота оцениваться НЕ будут. Трогать робота во время выполнения задания ЗАПРЕЩЕНО, иначе последует остановка сдачи оценка выполненной работы. На протяжении выполнения конкурсного задания робот должен сообщать находящимся вокруг людям о текущем состоянии выполнения задачи посредством световой индикации. Ожидается, что участники расположат индикационные лампы таким образом, что их будет хорошо видно с любой стороны соревновательного поля.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Робот выполняет задачу (находится на поле опасно) | Робот завершил выполнение задачи (находится на поле безопасно) |
Описание индикации
| Состояние лампы | Красная лампа не горит | Красная лампа горит | Зелёная лампа не горит | Зелёная лампа горит |
| Условное обозначение |
Примечание к модулю E1, Е2:
1)Задача считается выполненной, когда робот находится в позиции финиша, и все заказы расположены правильно. В данном заезде учитывается время выполнения задания.
2) Участникам разрешена коммуникация.
3) Разрешается манипулировать несколькими Медикаментами одновременно
4) Запрещено использовать изображение с USB камеры.
Выполнение Е3, E4 (Выполнение в режиме телеуправления в прямой и непрямой видимости):
Робот устанавливается в зону старта. После начала заезда задача робота под управлением конкурсанта доставить заранее известные заказы. По окончанию выполнения задания робот должен переместиться в зону финиша. Задание считается полностью выполненным если в конце заезда колёсная база робота находится в рамках зоны финиша, все заказы расположены верно, световая индикация полностью соответствовала указанной. На выполнение задания отводится 10 минут. По истечении этого времени дальнейшие действия робота оцениваться НЕ будут. Трогать робота во время выполнения задания ЗАПРЕЩЕНО, иначе последует остановка сдачи оценка выполненной работы. На протяжении выполнения конкурсного задания робот должен сообщать находящимся вокруг людям о текущем состоянии выполнения задачи посредством световой индикации. Ожидается, что участники расположат индикационные лампы таким образом, что их будет хорошо видно с любой стороны соревновательного поля.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Робот выполняет задачу (находится на поле опасно) | Робот завершил выполнение задачи (находится на поле безопасно) |
Описание индикации
| Состояние лампы | Красная лампа не горит | Красная лампа горит | Зелёная лампа не горит | Зелёная лампа горит |
| Условное обозначение |
Примечание к модулю E3, Е4:
1) Задача считается выполненной, когда робот находится в позиции финиша, и все заказы расположены правильно.
2) В данном заезде учитывается время выполнения задания.
3) Разрешается манипулировать несколькими медикаментами одновременно.
Модуль F : Проверка эксплуатационных характеристик и ввод в эксплуатацию
Включает в себя выполнение заезда в автономном режиме и в режиме телеуправления с заранее неизвестным заказом. Конкурсанты должны принять участие в выполнении двух оцениваемых конкурсных заданий в течение конкурсного дня. Модуль разделяться на суб-критерии F1, F2, F3, F4.
Алгоритм работы.
Выполнение F1, F2 (Автономный режим работы):
Робот устанавливается в зону старта. После начала заезда робот должен в автономном режиме считать доску заказа и в соответствии с доской выполнить все необходимые перемещения элементов больницы. По окончанию выполнения задания робот должен переместиться в зону финиша. Задание считается полностью выполненным если в конце заезда колёсная база робота находится в рамках зоны финиша, все заказы расположены верно, световая индикация полностью соответствовала указанной. На выполнение задания отводится 10 минут. По истечении этого времени дальнейшие действия робота оцениваться НЕ будут. Трогать робота во время выполнения задания ЗАПРЕЩЕНО, иначе последует остановка сдачи оценка выполненной работы. На протяжении выполнения конкурсного задания робот должен сообщать находящимся вокруг людям о текущем состоянии выполнения задачи посредством световой индикации. Ожидается, что участники расположат индикационные лампы таким образом, что их будет хорошо видно с любой стороны соревновательного поля.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Робот выполняет задачу (находится на поле опасно) | Робот завершил выполнение задачи (находится на поле безопасно) |
| 2 BuGDJqMbR6jgBz0s8tFVplPjzvSO/SaUgkPIp1pBFUKbSumLCq32Y9cisXdwndWBZVdK0+kzh9tG TqJoJq2uiRsq3eKywuK4OVkFh75N4snq7XX99LX8/N6+7MpVvFPq5np4fAARcAiXZ/jDZ3TImWnv TmS8aBTcT3lK4Hs8BcF+Mme9VzCfJSDzTP7nz38BAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+ AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAA ACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAA ACEAKgTcOsACAACmBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYA CAAAACEA6SOQEeAAAAAHAQAADwAAAAAAAAAAAAAAAAAaBQAAZHJzL2Rvd25yZXYueG1sUEsFBgAA AAAEAAQA8wAAACcGAAAAAA== " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="red" strokecolor="#243f60 [1604]" strokeweight="2pt"> | d AhGiIWsaT6jhGwMs8uurzKTWX+gd+00sBY9QSI2GKsY2lTIUFToTRr5F4uzkO2ci266UtjMXHneN nCTJVDpTEz9UpsVlhcXn5uw0nPp2riart9f102G5/9q+7MqV2ml9ezM8PoCIOMS/MvziMzrkzHT0 Z7JBNOzVnJusM1bO1Zj1qGE2vQeZZ/I/f/4DAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+AAAA 4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAAACEA OP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAAACEA wjtqvcACAACmBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYACAAA ACEAv+eN4d0AAAAHAQAADwAAAAAAAAAAAAAAAAAaBQAAZHJzL2Rvd25yZXYueG1sUEsFBgAAAAAE AAQA8wAAACQGAAAAAA== " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="red" strokecolor="#243f60 [1604]" strokeweight="2pt"> g QjRkTesJNYwYYJlfX2Umtf5MH3gqYiW4hEJqNNQxdqmUoazRmTD1HRLvPn3vTGTbV9L25szlrpUP SaKkMw3xhdp0uK6x/C6OTsPb5mtcL+RLtVWTn9V72BaT19mo9e3NsHoGEXGIf2G44DM65Mx08Eey QbTsk9mCoyzmPC8BpVgcNMzVI8g8k/8/yH8BAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+AAAA 4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAAACEA OP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAAACEA 47gTb78CAACmBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYACAAA ACEAPOE2HN4AAAAJAQAADwAAAAAAAAAAAAAAAAAZBQAAZHJzL2Rvd25yZXYueG1sUEsFBgAAAAAE AAQA8wAAACQGAAAAAA== " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="#00b050" strokecolor="#243f60 [1604]" strokeweight="2pt"> |
Описание индикации
| Состояние лампы | Красная лампа не горит | Красная лампа горит | Зелёная лампа не горит | Зелёная лампа горит | |
| Условное обозначение |
| L UCEiW+w8k4GJAqyK87McM+tP/ELHMtZKSjhkaKCJsc+0DlVDDsPc98TivfvBYRQ51NoOeJJy1+nr JEm1w5ZlocGeNg1Vn+XBGXjafkybO/1Q79LZ1/o57MrZ481kzOXFuL4HFWmMf2H4wRd0KIRp7w9s g+oM3KYSlHeyACV2uhS9/726yPV//OIbAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+AAAA4QEA ABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAAACEAOP0h /9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAAACEAbJAY I8ACAACmBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYACAAAACEA 0xqvUNoAAAAGAQAADwAAAAAAAAAAAAAAAAAaBQAAZHJzL2Rvd25yZXYueG1sUEsFBgAAAAAEAAQA 8wAAACEGAAAAAA== " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="#00b050" strokecolor="#243f60 [1604]" strokeweight="2pt"> | |||
Примечание к модулю F1, F2:
1) Задача считается выполненной, когда оба робота находятся в позиции финиша, и все шайбы расположены правильно.
2) В данном заезде учитывается время выполнения задания.
3) Участникам разрешена коммуникация.
4) Разрешается манипулировать несколькими шайбами одновременно
5) Запрещено использовать изображение с USB камеры
Выполнение F3, F4 (Режим телеуправления):
Робот устанавливается в зону старта. После начала заезда задача робота под управлением конкурсанта переместить компоненты поля в соответствии с доской заказов. По окончанию выполнения задания робот должен переместиться в зону финиша. Задание считается полностью выполненным если в конце заезда колёсная база робота находится в рамках зоны финиша, все заказы расположены верно, световая индикация полностью соответствовала указанной. На выполнение задания отводится 10 минут. По истечении этого времени дальнейшие действия робота оцениваться НЕ будут. Трогать робота во время выполнения задания ЗАПРЕЩЕНО, иначе последует остановка сдачи оценка выполненной работы. На протяжении выполнения конкурсного задания робот должен сообщать находящимся вокруг людям о текущем состоянии выполнения задачи посредством световой индикации. Ожидается, что участники расположат индикационные лампы таким образом, что их будет хорошо видно с любой стороны соревновательного поля.
| Робот не движется и ожидает нажатия кнопки старта для выполнения задачи (находится на поле безопасно) | Робот выполняет задачу (находится на поле опасно) | Робот завершил выполнение задачи (находится на поле безопасно) |
| 2 BuGDJqMbR6jgBz0s8tFVplPjzvSO/SaUgkPIp1pBFUKbSumLCq32Y9cisXdwndWBZVdK0+kzh9tG TqJoJq2uiRsq3eKywuK4OVkFh75N4snq7XX99LX8/N6+7MpVvFPq5np4fAARcAiXZ/jDZ3TImWnv TmS8aBTcT3lK4Hs8BcF+Mme9VzCfJSDzTP7nz38BAAD//wMAUEsBAi0AFAAGAAgAAAAhALaDOJL+ AAAA4QEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5cGVzXS54bWxQSwECLQAUAAYACAAA ACEAOP0h/9YAAACUAQAACwAAAAAAAAAAAAAAAAAvAQAAX3JlbHMvLnJlbHNQSwECLQAUAAYACAAA ACEAU0J3acACAACmBQAADgAAAAAAAAAAAAAAAAAuAgAAZHJzL2Uyb0RvYy54bWxQSwECLQAUAAYA CAAAACEA6SOQEeAAAAAHAQAADwAAAAAAAAAAAAAAAAAaBQAAZHJzL2Rvd25yZXYueG1sUEsFBgAA AAAEAAQA8wAAACcGAAAAAA== " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="red" strokecolor="#243f60 [1604]" strokeweight="2pt"> | P IEI0ZE3rCTWMGGCZX19lJrX+TB94KmIluIRCajTUMXaplKGs0Zkw9R0S7z5970xk21fS9ubM5a6V D0mipDMN8YXadLiusfwujk7D2+ZrXC/kS7VVk5/Ve9gWk9fZqPXtzbB6BhFxiH9huOAzOuTMdPBH skG07JPZgqMs5jwvAaVYHDTM1SPIPJP/P8h/AQAA//8DAFBLAQItABQABgAIAAAAIQC2gziS/gAA AOEBAAATAAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9UeXBlc10ueG1sUEsBAi0AFAAGAAgAAAAh ADj9If/WAAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9yZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAh AJo0lkrAAgAApgUAAA4AAAAAAAAAAAAAAAAALgIAAGRycy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgA AAAhADzhNhzeAAAACQEAAA8AAAAAAAAAAAAAAAAAGgUAAGRycy9kb3ducmV2LnhtbFBLBQYAAAAA BAAEAPMAAAAlBgAAAAA= " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="#00b050" strokecolor="#243f60 [1604]" strokeweight="2pt"> |
Описание индикации
| Состояние лампы | Красная лампа не горит | Красная лампа горит | Зелёная лампа не горит | Зелёная лампа горит |
| Условное обозначение | h IlvsPJOBiQKsivOzHDPrT/xCxzLWSko4ZGigibHPtA5VQw7D3PfE4r37wWEUOdTaDniSctfp6yRJ tcOWZaHBnjYNVZ/lwRl42n5Mmzv9UO/S2df6OezK2ePNZMzlxbi+BxVpjH9h+MEXdCiEae8PbIPq DNymEpR3sgAldroUvf+9usj1f/ziGwAA//8DAFBLAQItABQABgAIAAAAIQC2gziS/gAAAOEBAAAT AAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9UeXBlc10ueG1sUEsBAi0AFAAGAAgAAAAhADj9If/W AAAAlAEAAAsAAAAAAAAAAAAAAAAALwEAAF9yZWxzLy5yZWxzUEsBAi0AFAAGAAgAAAAhAHzgpmy+ AgAApgUAAA4AAAAAAAAAAAAAAAAALgIAAGRycy9lMm9Eb2MueG1sUEsBAi0AFAAGAAgAAAAhANMa r1DaAAAABgEAAA8AAAAAAAAAAAAAAAAAGAUAAGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPMA AAAfBgAAAAA= " path="m,185738l55118,149683,26798,92869,93946,87235r6067,-62351l161197,51181,200025,r38828,51181l300038,24884r6066,62351l373252,92869r-28320,56814l400050,185738r-55118,36054l373252,278606r-67148,5634l300038,346591,238853,320294r-38828,51181l161197,320294r-61184,26297l93946,284240,26798,278606,55118,221792,,185738xe" fillcolor="#00b050" strokecolor="#243f60 [1604]" strokeweight="2pt"> |
5. Критерии оценки .
Таблица 3.
| Критерий | Баллы | |||
| Судейская оценка | Объективная оценка | Общая оценка | ||
| A | Организация работ и межличностные отношения | - | 6 | 6 |
| B | Технический журнал | 5 | 2 | 7 |
| С | Базовые действия | - | 7.5 | 7.5 |
| D | Оценка роботов | 6 | - | 6 |
| E | Базовое программирование, проверка эксплуатационных характеристик. | - | 25.6 | 25.6 |
| F | Ввод в эксплуатацию, оценка эффективности. | - | 32.9 | 32.9 |
| Итого | 11 | 74 | 85 | |
6. Приложения к заданию.
Каталка
| 
|
Линии
Линии ленты корта будут созданы с использованием черной ленты - 19 мм (3⁄4 дюйма)

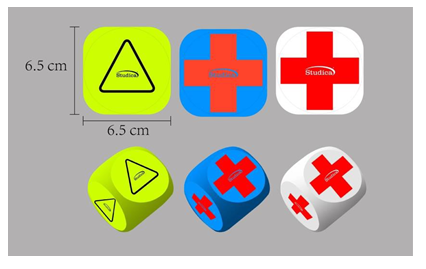
Наборы кубов целевых объектов
Общее количество медицинских кубов - 21 шт.
Примечание: Кубы изготовлены из мягкого материала.
Подставки для кубов и площадки для каталок

| Подставки для кубиков и площадки для каталок во ВСЕХ палатах для пациентов располагаются вдоль задней стены каждой палаты пациента и размещаются в соответствии с размерным шаблоном, показанным на изображении справа. Конкретную информацию, относящуюся к положению подставки для катания по отношению к стенам справа и слева от подставки для катания, можно найти на полном чертеже компоновки. Размер подставок для кубиков 60х60х80мм | 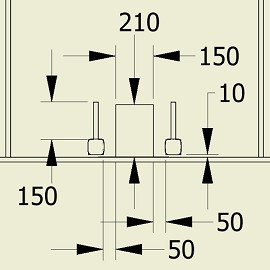
|
| Patiet Room | 1 |
| Patiet Room | 2 |
| Patiet Room | 3 |
| Patiet Room | 4 |
| Patiet Room | 5 |
| Nurse’s Station | |
| Hazardous Material Bin | |
| Home Sanitation Station |
Символы для считывания заказа

| 
|

|
|
Доска заказов на работу
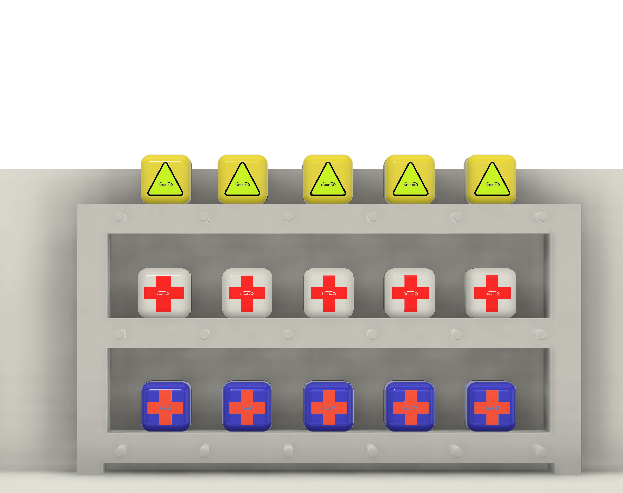
Диспансерные стеллажи
Схема застройки поля