
Типовое конкурсное задание








ДЛЯ РЕГИОНАЛЬНЫХ ЧЕМПИОНАТОВ
чемпионатного цикла 2021 – 2022 гг.
КОМПЕТЕНЦИИ
«Мобильная робототехника»
для основной возрастной категории
16-22 года.
Конкурсное задание включает в себя следующие разделы:
1. Форма участия в конкурсе: 2
2. Общее время на выполнение задания: 2
3. Задание для конкурса 2
4. Модули задания и необходимое время 13
5. Критерии оценки. 26
6. Приложения к заданию. 27
1. Форма участия в конкурсе: Командный конкурс. В команде 2 участника, программист и техник.
2. Общее время на выполнение задания: 21 ч.
3. Задание для конкурса
В современном мире мобильные роботы играют все более важную роль в поддержке медицинского персонала в больницах. В текущем конкурсном задании конкурсантам предлагается спроектировать, построить и эксплуатировать мобильного робота, способного удовлетворить ВСЕ требования к производительности, представленные в данном конкурсном задании.
Данное конкурсное задание основано на задании Чемпионата Мира WorldSkills Shanghai 2022 по компетенции «Мобильная робототехника».
В рамках Полуфинала и Финала национального Чемпионата к работе допускаются комплекты WorldSkills Shanghai 2022.
ОПИСАНИЕ ДЛЯ УЧАСТНИКОВ
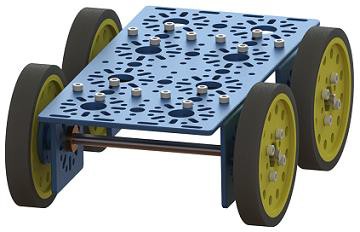
Команды из двух участников должны спроектировать и построить мобильного робота, который будет эффективно работать в смоделированной больничной среде. В сопровождении к построенному роботу, участники должны разработать технический журнал, в котором будут отображены следующие разделы:
· Конструкция каркаса;
· Электроника и электропроводка;
· Конструкция системы управления объектами;
· Мобильность робота;
· Программирование.
Робот должен быть сконструирован для работы в автономном режиме и в режиме телеуправления.
Режим телеуправления будет представлен как в прямой видимости, так и в непрямой. Оператор пульта дистанционного управления в прямой видимости МОЖЕТ менять свое положении, чтобы видеть все объекты для оценки рабочих характеристик.
Ожидается, что участники определят основной набор требований к характеристикам мобильного робота путем анализа информации, представленной в этом документе:
1. Робот должен читать / интерпретировать информацию, представленную через доску заказов.
2. Робот должен перемещаться в автономном режиме управления в рамках предоставленной среды оценки производительности.
3. Роботу требуется управлять различными объектами (кубиками / каталками) из разных начальных мест и доставлять их в различные места назначения в рабочей среде в соответствии с полученным заданием.
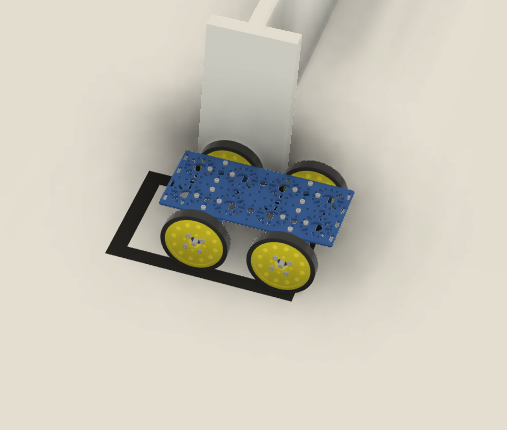
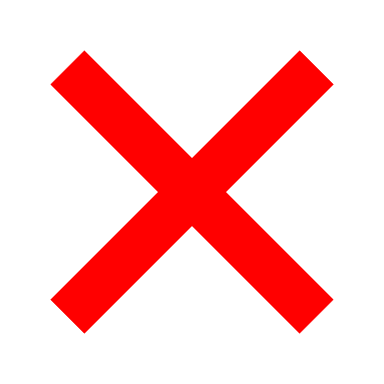
4. Каждый робот должен помещаться в параллелепипед размерами 600 * 600 * 600мм (Д*Ш*В) чтобы свободно перемещаться по застроенной площадке.
Примечание. В день С1, когда основное внимание уделяется отдельным элементам производительности роботов, роботы должны будут функционировать - выполнять все индивидуальные оцениваемые элементы производительности в режимах дистанционного управления и автономного управления.
Среда производительности, описанная в этом документе, будет средой производительности, используемой в дни C1 – C3.
В конкурсные дни соревнований C2 и C3 будут введены дополнительные, новые требования к характеристикам роботов, что повлечет внесение изменений в конструкцию роботов участников.
ОПИСАНИЕ ЭЛЕМЕНТОВ КОНКУРСНОГО ЗАДАНИЯ
Есть ЧЕТЫРЕ объекта-мишени / препятствия, представленные на таблице 1, с которыми должен взаимодействовать мобильный робот.
| Таблица 1 |
| | |
| Имеются кубики двух цветов (белый и синий) с лекарствами, размером 65х 65х65 мм. Нет ограничений на количество кубиков с лекарствами, которыми одновременно робот может манипулировать.
| |
|
| |
| Кубы Hazmat содержащие (по легенде) опасные материалы с зараженными веществами - желтые кубики размером 65х65х65 мм. Существует ряд правил, связанных с загрязненными и чистыми кубиками Hazmat: 1. Роботы не могут владеть ни одним из кубиков с лекарствами одновременно с зараженными кубиками опасного вещества. 2. Роботы не могут одновременно владеть несколькими кубами Hazmat. 3. ПОСЛЕ того, как робот завершил работу с кубом Hazmat, он ДОЛЖЕН вернуться в указанную зону и занять место в зоне очистки диаметре 650 мм и выполнить вращение более чем 540 градусов ПЕРЕД дальнейшей работой с кубиками в дезинфицирующей зоне. | |

|
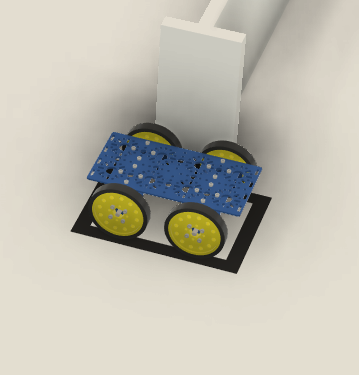
| Роботы должны будут избегать Каталки в коридоре. Оценка, связанная с каталкой, будет основана на том, не переместил ли робот и она все еще находится на своей первоначальной площадке. Вне зависимости от того, была ли проведена манипуляция с каталкой или нет, положение «Каталки» будет определяться положением колес каталки по колесной базе после выполнения задания конкурсантами. 1. ЕСЛИ ТРИ и более колеса Каталок находятся за пределами площадки для каталок / находятся в контакте с полом, окружающим площадку для катания, то каталка будет определена как «Находящаяся вне площадки для каталок». 2. ЕСЛИ ОДНО или ДВА колеса Каталок находятся за пределами площадки для каталок / находятся в контакте с полом, окружающим площадку для катания, то каталка будет определена как «Частично находящаяся вне площадки для каталок». 3. ЕСЛИ ВСЕ четыре колеса Каталки находятся в контакте с площадкой для каталки, то каталка будет определена как «Находящаяся на площадке для каталок». 4. Оценка нахождения колес на площадке и за ее пределами оценивается по физическому касанию колес внешней среды, выход проекции Каталки за пределы площадки для каталок – не учитывается. |
| 
|  
|
Каталка считается полностью расположенной в ячейке если её колеса не выходят за внешние рамки ячейки!
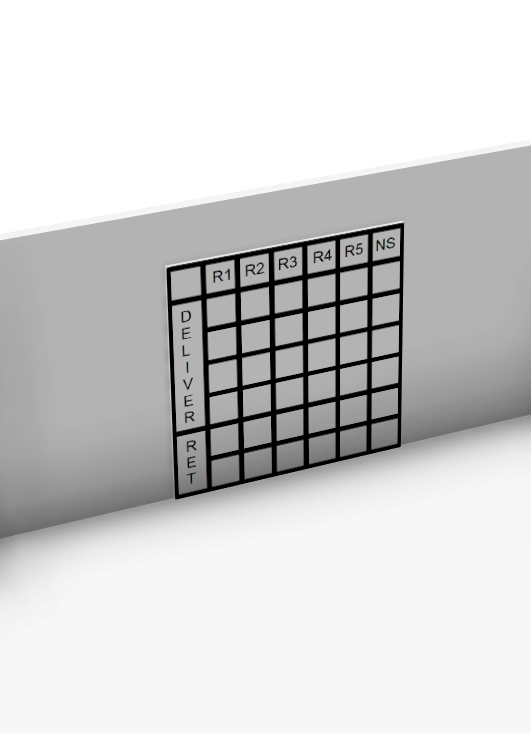 ДОСКА ЗАКАЗОВ
ДОСКА ЗАКАЗОВ
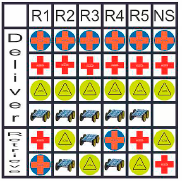
При выполнении тестовых проектов, когда робот не знает деталей работы заранее, роботу необходимо будет добраться до «Доски заказов» и «Прочитать доску», чтобы определить, количество и тип перевозящих медицинских кубов и каталок. Последовательность доставки определяется случайной жеребьевкой.
Нет НИКАКИХ ограничений на количество считываний «Доски заказов» во время выполнения отдельного оцененного тестового проекта.
ПАЛАТЫ ПАЦИЕНТОВ

Палаты для пациента содержат в себе площадку для каталки, красный параллелепипед – для опасных веществ и зеленый параллелепипед – для медикаментов.
Есть общие черты между рабочими роботами, которые, как ожидается, будут выполнять работу во всех отделениях больницы. Однако есть также требования к работе, которые уникальны для разных отделений больницы. Участники должны адаптировать робота для работы более чем в одном отделение больницы.
Пример: Сценарий 1
Робот определяет Таблицу заказов, закрепленную на стене. В этой больнице ожидается, что робот сможет:
А) Доставить белые / синие кубики с лекарствами / очистить палаты пациентов от кубов опасного вида (Hazmat) и каталок.
Б) Извлечь куб опасного вида (Hazmat) из палаты пациентов и отправьте их в корзину.
С) Извлечь каталки из комнат пациентов и поместите их в назначенный проход для каталок.
Пример: Сценарий 2
Робот определяет Таблицу заказов, закрепленную на стене, но также ожидает, что робот «распознает окружающую среду» и предпримет независимые действия при определенных обстоятельствах.
А) Доска заказов определяет комнаты пациентов, в которые робот должен доставить белые / синие медицинские кубики и каталки.
Б) Если робот обнаруживает присутствие в виде «Каталки» в комнате, то ожидается, что робот возьмет под свой контроль «Каталку» и переместит ее на площадку в коридоре.
С) Если робот обнаруживает присутствие куба опасного вида (Hazmat) в комнате, то ожидается, что робот возьмет под свой контроль куб опасного вида (Hazmat) и доставит его в корзину для материалов опасного вещества.
Пример: Сценарий 3
Робот определяет Таблицу заказов, закрепленную на стене, но также ожидает, что робот «распознает окружающую среду» и предпримет независимые действия при определенных обстоятельствах.
А) Доска заказов определяет комнаты пациентов, в которые робот должен доставить белые / синие медицинские кубики и каталки.
Б) Если робот обнаруживает присутствие в виде «Каталки» в комнате, то ожидается, что робот возьмет под свой контроль «Каталку» и переместит ее на площадку в коридоре.
С) Если робот обнаруживает присутствие куба опасного вида (Hazmat) в комнате, то ожидается, что робот возьмет под свой контроль куб опасного вида (Hazmat) и доставит его в корзину для материалов опасного вещества.
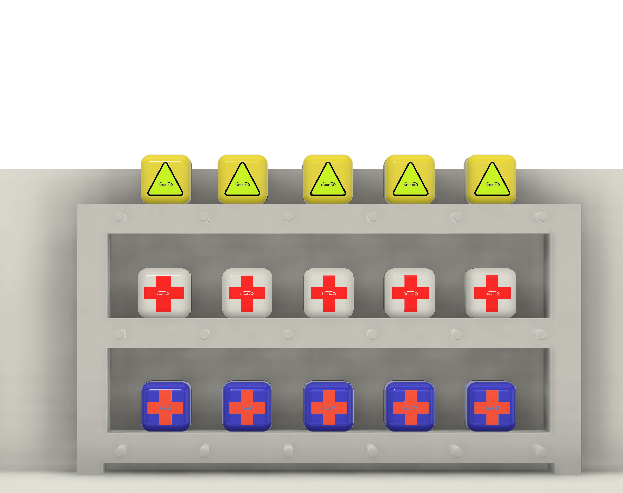
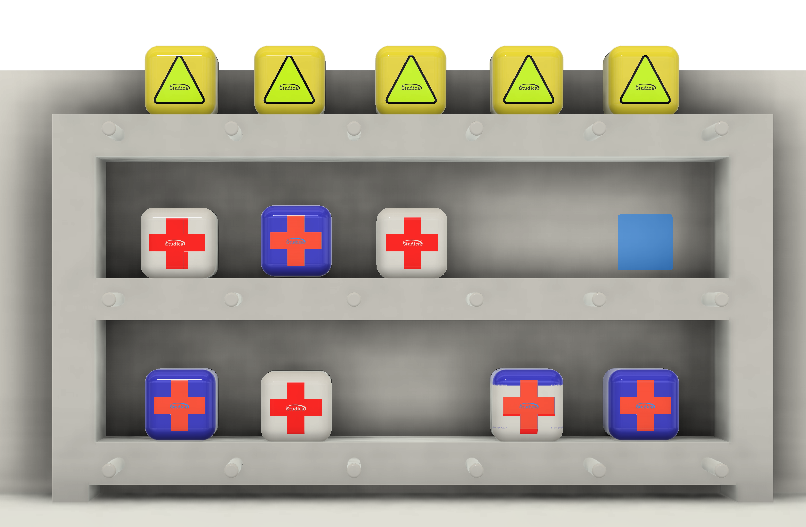
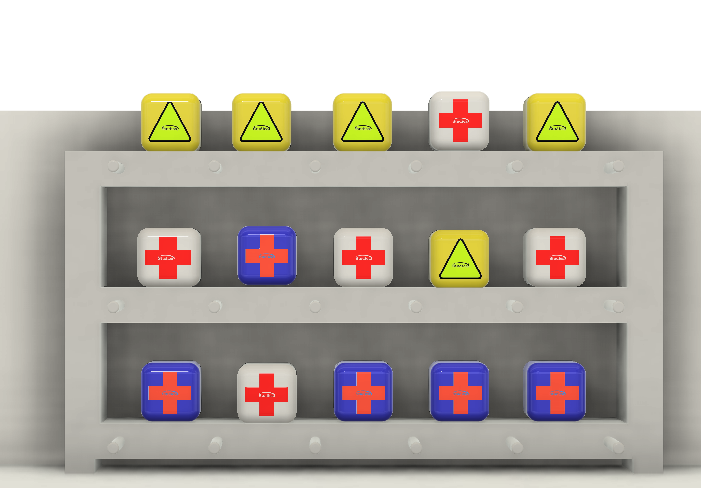
Примечание.
На изображении ниже представлены примеры расположения медицинских кубов, месторасположение которых будет предоставлено участникам в начале дня соревнований.
| 
| 
|
Необходимое оборудование, дополнительные детали и материалы
Ожидается, что участники разработают своих мобильных роботов с использованием компонентов, представленных в Шанхайской коллекции компонентов для мобильной робототехники WorldSkills Shanghai 2022.
На C2 и C3 могут быть внесены изменения в задание, что может потребовать перепроектирование робота и ИЗМЕНЕНИЕ его КОНСТРУКЦИИ, для выполнения последующих задач.
Ожидается, что участники соберут полноценного мобильного робота во время подготовки к соревнованиям. Участники могут использовать в конструкции робота дополнительные детали, сделанные с использованием ЧПУ-станка либо напечатанные на 3D-принтере, изготовленные из ABS, PLA, PETG, HIPS пластика или углеродного волокна с максимальным общим весом в 1 кг. Это должно быть подтверждено в Журнале техника вместе с визуальной оценкой, а также участники должны предоставить таблицу с дополнительными деталями и их весом. (Дополнительные детали превышающие установленный вес будут не допущены к использованию).
Все компоненты, разработанные из листового материала, должны быть созданы из любого поликарбонатного материала с максимальным габаритным размером листа 1000 на 1000 мм (максимальная толщина - 5 мм). Это должно быть подтверждено в Журнале техника вместе с визуальной оценкой.
В C-1 «День ознакомления» ВСЕ дополнительные детали, изготовленные конкурсантами, будут проверены, чтобы убедиться, что участники соблюдают эти ограничения. Если участники превышают эти ограничения, они должны будут изменить конструкцию своего робота, чтобы привести его в соответствие с этими ограничениями, ДО того, как им будет разрешено участвовать в соревнованиях.
Конкурсантам также разрешается приносить нестандартные кабели и электрические провода, необходимые для электропроводки робота.
Примечание.
ТОЛЬКО в рамках региональных чемпионатов, допускается использование ранее-выпущенных комплектов, с контроллером Ni MyRIO. Также, допускается перемешивание конструкционных и электрических компонентов, таким образом, чтобы не нарушалось следующее условие:
· Используются 4dc – мотора;
· Используются 3 сервопривода (не важно какого типа);
· Используются 2 инфракрасных датчика;
· Используется 1 датчик линий;
· Используются 2 ультразвуковых датчика.
· Используется 1 servo power block или 1 DC-DC преобразователь напряжения.
· Используется связка MyRio(и 2 драйвера версии MD1 или MD2) + BackHawk или связка Studica VMX + Titan Quad Motor Controller.
· Используется 1 камера (Microsoft live cam или SR-Pro Camera).
Компоненты, которые превышают описанное выше количество – будут изъяты и запрещены к использованию. Световая индикация и количество кнопок управления и кнопок (лимитирующих действия) - остается на усмотрение участников.
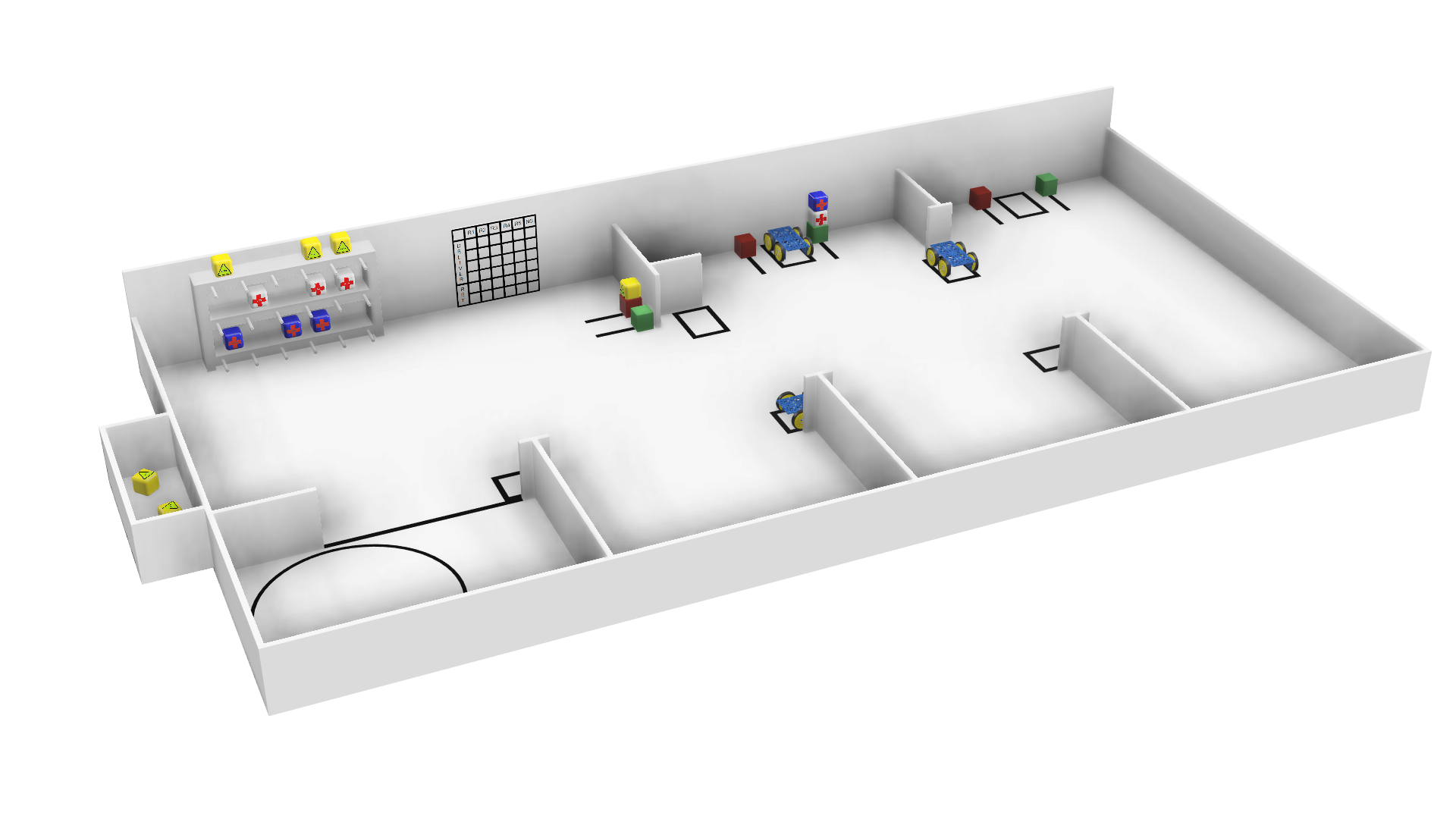
КОНСТРУКЦИЯ СОРЕВНОВАТЕЛЬНОГО ПОЛЯ
Прочный гладкий твердый пол белого цвета рабочей среды для одной команды (площадки) создается путем выполнения следующих операций:
· Разрезание соединений на шкантах вдоль двух сторон центральных белых плит МДФ размером 2000x2000x19 мм и одной стороны концевых белых плит МДФ.
· Вставка стыковых накладок из фанеры.
· Сдвигание плит вместе.
· Высота стенок поля 24 см.
· Высота стенки с доской заказов 40 см.
Выше на рисунке показано пространство для одной базовой команды, включая среду выполнения конкурсного задания для использования одной командой.
КОМПЬЮТЕРЫ/ИНСТРУМЕНТЫ, РАСПОЛАГАЮЩИЕСЯ В КОНКУРСНОМ ПРОСТРАНСТВЕ КОНКУРСАНТА
· В конкурсном пространстве команды могут иметь не более двух переносных компьютеров.
· В конкурсном пространстве команды могут использовать не более двух USB флэш-накопителей.
· Конкурсанты ДОЛЖНЫ ВНЕСТИ свои переносные компьютеры и USB флэш-накопители в конкурсное пространство в день ознакомления (С-1), и эти элементы оборудования НЕ ДОЛЖНЫ ни на какое время ПОКИДАТЬ пределы конкурсного пространства вплоть до окончания конкурсного соревнований.
· Конкурсантам НЕ РАЗРЕШАЕТСЯ приносить в конкурсное пространство сотовые/мобильные телефоны, планшеты или иные телекоммуникационные устройства.
· Конкурсантам НЕ РАЗРЕШАЕТСЯ иметь доступ в Интернет без присмотра экспертов с особыми полномочиями, пока они находится в пространстве чемпионата.
· Конкурсантам разрешается ИСПОЛЬЗОВАТЬ программные файлы, которые они создали во время подготовки к выполнению своих конкурсных заданий.
· Как указано в Техническом описании: конкурсанты могут принести ящик для инструментов объемом не более 1 кубического метра.
ПРИМЕЧАНИЕ: это ограничение максимального размера. Командам рекомендуется приносить инструментальные ящики, размеры которых существенно меньше этой величины.
ПРИМЕЧАНИЕ: при расчете «Размера инструментального ящика» робот конкурсанта ВКЛЮЧАЕТСЯ в расчет.
· Как указано в Техническом описании: команды могут принести мелкие инструменты для сборки и обслуживания своего Мобильного робототехнического комплекса, даже если эти инструменты отсутствуют в Инфраструктурном листе.
Например: отвертки, набор гаечных ключей, плоскогубцы, кусачки и т. д.
ПРИМЕЧАНИЕ: конкурсантам на назначенных производственных рабочих станциях разрешается иметь следующие «Электроинструменты»: устройства для зарядки аккумуляторов и аккумуляторные шуруповерты.
ПРИМЕЧАНИЕ: командам в своем назначенном рабочем пространстве НЕ разрешается иметь электроинструменты, предназначенные для удаления материала (ножовка, дрель, точильный станок) или оборудование для пайки.
ПРИМЕЧАНИЕ: необходимо предусмотреть совместно используемое безопасное помещение и инструменты, необходимые для использования безопасного помещения, которые позволят конкурсантам безопасным образом осуществлять операции по удалению материала или работы по пайке, выполнение которых может им понадобиться на рабочей площадке.
· Как указано в Техническом описании: самодельные инструменты и (или) инструменты, которые дают командам существенное преимущество перед другими командами, может быть удалено по решению экспертов.
ФОРМАТЫ РАБОТЫ С РОБОТОМ
Телеуправление. Изображение, отправляемое на монитор, должно поступать с камеры на роботе, которая функционирует независимо от системы управления VMX или MyRIO.
В случае возникновения неисправных проблем с качеством соединения с FPV систему у команд 50% + 1 от общего количества, проводится телеуправление с прямой видимостью

| |
| Камера FPV2 |
Автономное. Выполнение задание осуществляется без участия оператора в процессе движения и выполнения манипуляций над объектами робота
Секретное задание подразумевает наличие у конкурсантов навыков к самостоятельному выполнению поставленного задания за определённое время.
4. Модули задания и необходимое время
Таблица 2.
| Наименование модуля | Соревновательный день (С1, С2, С3) | Время на задание | |
| A | Организация работ и межличностные отношения | С1, С2, С3 | В течении соревновательного дня |
| B | Технический журнал | C1 | В течении подготовки к чемпионату |
| C | Базовые действия | С1 | 5 часа |
| D | Оценка роботов | С1 | В течении подготовки к чемпионату |
| E | Базовое программирование, проверка эксплуатационных характеристик. | С2 | 8 часов |
| F | Ввод в эксплуатацию, оценка эффективности. | С3 | 8 часов |
Модуль A: Организация работ и межличностные отношения
Алгоритм работы.
Предполагается, что участники на протяжении всех соревновательных дней будут демонстрировать высокие навыки межличностных отношений. Проявлять уважение как к своим напарникам, как и к участникам из других команд, а также к экспертам. На протяжении соревнований участники должны соблюдать график работы площадки и не доставлять затруднений другим командам его несоблюдением. Так же ожидается что участники будут следить за чистотой своего рабочего места, соревновательного поля, а также приводить в порядок после себя стол для пайки, слесарной обработки деталей, и другие общие рабочие места.
Особенности выполнения задания.
На протяжении соревновательных дней эксперты будут следить за соблюдением участниками графика работы на соревновательных площадках, рабочих местах, и графиком работы площадки. Так же эксперты будут следить за коммуникацией участников внутри команды, и с командами-оппонентами. Участники должны соблюдать кодекс этики при общении между собой и при общении с экспертами. Так же эксперты будут следить за соблюдением участниками техники безопасности.
Возможные ошибки.
· Не соблюдение графика подхода к полям
· Оскорбление напарника, участника из команды соперника, или эксперта.
· Не соблюдение техники безопасности
· Участники не убрали за собой общее соревновательное поле, чем доставили неудобства для следующей команды.
Модуль B : Технический журнал
Технический журнал по мобильной робототехнике конкурсантов
Судейская оценка определяется решением жюри, состоящим из 3 экспертов, при этом каждый из них присуждает оценку в диапазоне от 0 до 3 включительно. Затем в информационной системе Чемпионата (CIS) используется среднее значение из этих трех оценок для вычисления числа баллов, которое присуждается конкурсанту.
Пример:
1-й эксперт присудил 1 балл, 2-й эксперт присудил 2 балла, и 3-й эксперт присудил 2 балла.
В системе CIS производится расчет и присуждается 5/9 x 1,25 = 0,694 балла.
Алгоритм работы.
Во время выполнения работ по подготовке к чемпионату конкурсанты должны вести Журнал технического специалиста по мобильной робототехнике описывающий РОБОТА. Суммарное количество страниц журнала не должно превышать 25 страниц (Титульный лист и содержание не входят в счет), шрифт - 14 Times New Roman , оглавления разделов - 18 Times New Roman , заголовки - 16 Times New Roman . Параметры страницы: правое поле – 1,5 см, левое поле – 2,5 см, верхнее и нижнее поля – 2 см, междустрочный интервал – полуторный.