
Рис. 9.1. Структура системы управления с наблюдателем








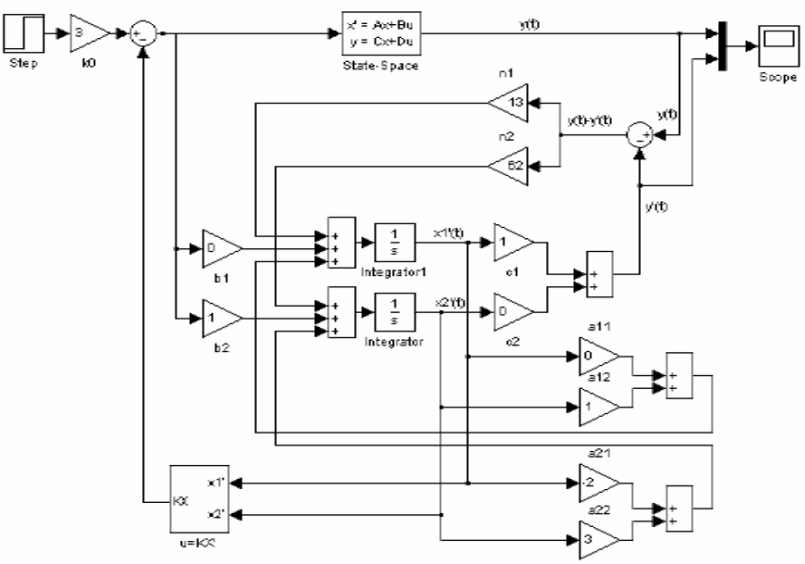
Рис. 9.2. Моделирование работы наблюдателя в Simulink MatLab
Параметры наблюдателя и параметры регулятора могут рассчитываться независимо.
Понятно, что процессы в наблюдателе должны протекать более быстро, чем переходный процесс в системе. Эмпирически установлено, что наблюдатель должен обладать быстродействием, в 2–4 раза превышающим быстродействие системы.
Использование пакета MatLab
В программном комплексе MatLab для формирования модели в пространстве состояний используется функция ss ,
>> sys = ss(A, B, C, D),
где A, B, C, D – матрицы модели.
Матрица наблюдаемости может быть построена с помощью функции obsv, которая также может вызываться в одном из вариантов:
>> N = obsv(A, С)
>> N = obsv(sys)
>> N = obsv(sys.A,sys.С)
Описанная выше функция acker может быть применена и для расчета коэффициентов обратных связей наблюдателя одномерной системы.
Для этого надо транспонировать матрицу A и заменить B на СТ:
>>N=acker(AТ,СТ,Р),
где Р – вектор желаемых полюсов наблюдателя.
Например:
>>A=[0 1; _2 3];
>> B=[0; 1];
>>C=[1 0];
>> P=[_5 _5];
>> N1=acker(A’,C’,P);
>> N=N1’;
N =
13
62
Для последнего примера на рис. 2 приведена собранная в MatLab Simulnk структура системы с наблюдающим устройством.
Для многомерных (и одномерных) систем эту же задачу можно
решить с помощью функции place
>>N=place(AТ,СТ,Р)
В MatLab существуют специальные функции для формирования наблюдателя.
Функция estim формирует наблюдающее устройство в виде ss объекта для оценивания вектора переменных состояния модели объекта управления sys и для заданной матрицы коэффициентов обратных связей наблюдателя L:
>> est=estim(sys,L)
Функция reg формирует регулятор для заданной в пространстве
состояний модели объекта управления sys, матрицы коэффициентов обратных связей по переменным состояния K и матрицы коэффициентов обратных связей наблюдателя L:
>> rsys=reg(sys,K,L).
- Порядок выполнения работы
1. Для заданного варианта объекта управления, заданного матрицами А, В, С (см. табл. в лабораторной работе № 8) обосновать возможность модального управления с помощью критерия управляемости.
2. Рассчитать коэффициенты обратной связи, при которой обеспечивается желаемое расположение полюсов замкнутой системы.
3. С помощью выбора масштабирующего коэффициента обеспечить в системе нулевую установившуюся ошибку.
4. Рассчитать параметры наблюдающего устройства для восстановления вектора состояния объекта.
5. Собрать в Simulink MatLab структурную схему системы с модальным регулятором (используя блок State space) и наблюдателем.
6. Исследовать влияние параметров наблюдающего устройства на характер переходных процессов в системе.
- Содержание отчета
Отчет о лабораторной работе должен содержать:
1. Краткие теоретические сведения.
2. Расчетную часть.
3. Структурную схему моделирования в MatLab Simulink.
4. Графики переходных процессов в системе.
5. Выводы о проделанной работе.
Контрольные вопросы
1. Какая система называется наблюдаемой?
2. Запишите условие наблюдаемости и поясните его.
3. Какие наблюдающие устройства называются асимптотическими?
4. Поясните структурную схему системы управления с наблюдателем
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
1. Бесекерский, В. А. Теория автоматического регулирования/ В.А. Бессекерский, Е.П. Попов. – М.: Наука, 1975. 768 с.
2. Попов, Е. П. Теория линейных систем автоматического регулирования и управления / Е.П Попов. – М.: Наука, 1989. 304 с.
3. Дорф, Р., Бишоп Р. Современные системы управления / Р. Дорф, Р.Бишоп. – М: Лаборатория базовых знаний, 2002. 832 с.
4. Гудвин Г. К., Гребе С. Ф., Сальгадо М. Э. Проектирование систем управления. М.: Бином, 2004. 911 с.
5. Коновалов, Б.И., лебедев Ю. М. Теория автоматического управления:учеб. пособие для вузов / Б.И. Коновалов, Ю.М. Лебедев - изд. 3-е, доп. И перераб. Спб. [и др.]: Лань, 2010.-218 с.
6. Теория автоматического управления: учеб. для вузов / С.Е. Душин , Н.С. Зотов, Д.Х Имаев, Н.Н. Кузьмин; под ред. В.Б. Яковлева изд. 3-е, стер.-М.: Высш. шк., 2009.-567 с.
7. Ким, Д.П. Теория автоматического управления: учеб. пособие для вузов: в 2 т.т. 1:линейные системы / Д.П. Ким. - Изд. 2-е, испр. и доп. . М.: Физматлит, 2007.-310 с.
8. Ким, Д.П. Теория автоматического управления: учеб. пособие для вузов: в 2 т.т. 2: многомерные, нелинейные, оптимальные и адаптивные системы. / Д.П. кИМ-изд. 2-е, испр. и доп. .-м.: физматлит,2007. -440 с.
9. Востриков, А.С. Теория автоматического регулирования: учеб. пособие для вузов / А.С. Востриков, Г.А. Французова. - изд. 2-е, стер.- М.: Высш. шк., 2006.-365 с.
10. Теория автоматического управления: Учеб. для вузов / В. Н. Брюханов, М. Г. Косов, С. П. Протопопов, Ю. М. Соломенцев; Под ред Ю. М. Соломенцева. – М.: Высш. шк., 1999.
11. Теория автоматического управления: Учеб. для вузов. – Ч. 1. Теория линейных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
12. Теория автоматического управления: Учеб. для вузов: В 2 ч. – Ч. 2. Теория нелинейных и специальных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
13. Бесекерский, В.А. Теория систем автоматического управления. / В.А. Бесекерский, Е.П. Попов - Изд. 4-е, перераб. и доп.- Спб.: Профессия, 2003. -747 С.
Теория автоматического управления [Текст] + [Электронный ресурс]: методические указания к выполнению лабораторных № 1-5 для студентов очной формы обучения по направлению подготовки 140400 «Электроэнергетика и электротехника».– Брянск: БГТУ, 2015. – 34 с.
АЛЕКСЕЙ АЛЕКСЕЕВИЧ МАЛАХАНОВ
Научный редактор В.А. Хвостов
Компьютерный набор А.А. Малаханов
Темплан 2015 г.
Подписано в печать Формат 60х84 1/16. Бумага офсетная. Офсетная печать. Усл. печ.л. 1,97. Уч.-изд.л. 1,97. Тираж 1 экз. Заказ . Бесплатно
Издательство Брянского государственного технического университета
241035, Брянск, бульвар 50-лет Октября, 7, БГТУ, тел. 58-82-49
Лаборатория оперативной полиграфии, ул. Институтская, 16