Рис. 5.4. Фазовый портрет системы автоматического управления








- Содержание отчета
Отчет о лабораторной работе должен содержать:
1. Цель работы.
2. Структурную схему системы автоматического управления и ее параметры.
3. Передаточные функции разомкнутых систем в соответствии с заданием.
4. Расчет передаточных функций замкнутых систем.
5. Расчет корней характеристического уравнения.
6. Расчеты всех постоянных времени и частот собственных колебаний.
7. Задание времени и шага интегрирования.
8. Задание параметров начального отклонения и исходных параметров блока XY_Graf.
9. Результаты моделирования в виде переходного процесса и в виде фазовой траектории.
10.Фазовый портрет системы автоматического управления.
11.Выводы о проделанной работе.
Контрольные вопросы
1. Что называется фазовым пространством?
2. Что показывает фазовая траектория движения системы?
3. Как на фазовом пространстве показывают начальные условия движения системы?
4. Что называется особой точкой фазовой траектории?
5. Где располагается особая точка на фазовой плоскости? 6. Что называется фазовой плоскостью?
7. Что называется фазовым портретом?
8. При каком значении демпфирования в колебательном звене фазовый портрет имеет устойчивый предельный цикл?
9. При каком значении демпфирования в колебательном звене фазовый портрет имеет устойчивый фокус?
10. При каком значении демпфирования в колебательном звене фазовый портрет имеет неустойчивый фокус?
11. При каком значении демпфирования в звене фазовый портрет имеет устойчивый узел?
12. При каком значении демпфирования в звене фазовый портрет имеет неустойчивый узел?
13. При каком значении демпфирования в колебательном звене фазовый портрет имеет вид седла?
ЛАБОРАТОРНАЯ РАБОТА № 8
МОДАЛЬНОЕ УПРАВЛЕНИЕ
Цель лабораторной работы – изучить методику модального управления линейными динамическими объектами в пространстве состояний.
Продолжительность лабораторной работы – 4 часа.
- Краткие теоретические сведения
Состояние системы – это совокупность таких переменных, знание которых позволяет, при известном входе и известных уравнениях динамики, описать будущее состояние системы и значение ее выхода. Выбор переменных состояния неоднозначен.
Метод пространства состояний достаточно универсален, его можно применять для нелинейных систем многомерных систем. Для начального знакомства с этим подходом ниже рассматриваются линейные одномерные системы (или SISO – Single Input Single Output), уравнения состояний которых имеют следующий общий вид:
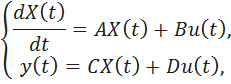
где X(t) – вектор-столбец состояния [n Ч 1]; А – матрица коэффициентов объекта [n Ч n]; В – матрица входа [n Ч 1]; u(t) – сигнал управления; Y – вектор выхода [k Ч 1]; С – матрица выхода [1 Ч n]; D – матрица влияния входа непосредственно на выход системы [n Ч 1] (часто полагают D = 0).
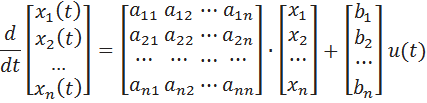
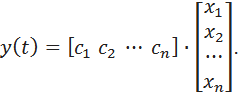
Уравнения состояния SISO-системы в развернутом виде:
Система, описываемая матрицами А и В, является управляемой, если существует такое неограниченное управление u(t), которое может перевести объект из начального состояния X(0) в любое другое состояние X(t).
Для SISO-системы с одним входом и одним выходом вводится понятие матрицы управляемости (размером  ):
):

Если детерминант этой матрицы отличен от нуля, то система управляема.
Модальный синтез предполагает формирование таких обратных связей по состоянию, при которых обеспечивается заданное расположение полюсов замкнутой системы. Модой называется составляющая решения дифференциального уравнения, соответствующая конкретному полюсу.
Расположение полюсов в основном определяет характер переходного процесса в системе. Обычно рассматриваются такие корневые оценки качества переходного процесса, как время переходного процесса, степень устойчивости, колебательность и перегулирование.
Для оценки быстродействия системы используется понятие степени устойчивости  , под которой понимается абсолютное значение вещественной части ближайшего к мнимой оси корня (потому что корни, имеющие наименьшую по модулю вещественную часть, дают в переходном процессе наиболее медленно затухающую составляющую).
, под которой понимается абсолютное значение вещественной части ближайшего к мнимой оси корня (потому что корни, имеющие наименьшую по модулю вещественную часть, дают в переходном процессе наиболее медленно затухающую составляющую).
Время переходного процесса t можно приближенно оценить по формуле

Запас устойчивости системы оценивается колебательностью. Система имеет склонность к колебаниям, если характеристическое уравнение содержит комплексные корни  .
.
Колебательность оценивается по формуле

По значению колебательности можно оценить перерегулирование
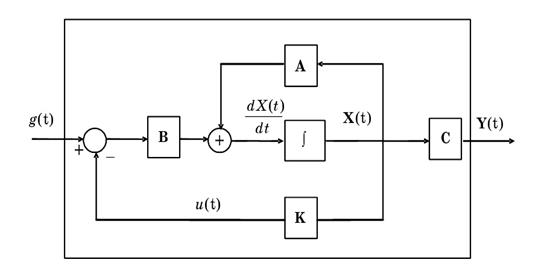
Для объекта, заданного уравнениями состояния (1), управление по состоянию описывается выражением

где К – вектор коэффициентов обратной связи.
Таким образом, система, замкнутая регулятором, приводится к следующему виду:
Этому выражению соответствует рис. 1, где g(t) – задающее воздействие.
Основная теорема модального управления гласит, что если линейная динамическая система (8.1) является управляемой, то линейная обратная связь может быть выбрана таким образом, что матрица (А-ВK) будет иметь желаемое расположение корней (спектр). При доказательстве этой теоремы используется каноническая форма управляемости матриц A и B.