Исследование САУ с П-регулятором








Схема САУ, с заданными параметрами имеет вид, представленный на рис. 3.3.
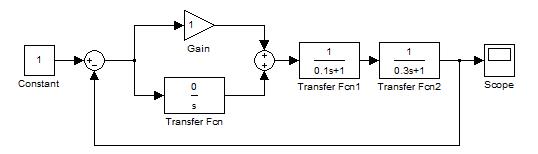
Рис. 3.1.
Экспериментальную зависимость e= f (  ) для САУ с П-регулятором получим путем многократного моделирования работы схемы при изменении величины пропорционального звена (Gain). Отмоделируем работу схемы при изменении коэффициента пропорционального звена от 1 до 50 со следующими значениями К (1, 2, 5, 10, 25, 50).
) для САУ с П-регулятором получим путем многократного моделирования работы схемы при изменении величины пропорционального звена (Gain). Отмоделируем работу схемы при изменении коэффициента пропорционального звена от 1 до 50 со следующими значениями К (1, 2, 5, 10, 25, 50).
Результаты экспериментов сведены на один график и представлены на рис. 3.4. Для коэффициента пропорционального регулятора К=2 это самый нижний график, для коэффициента 50 самый верхний. Ошибка регулирования для разных значений пропорционального регулятора представлена на рис. 3.5 и 3.6. Как видно из рис. 3.5 и 3.6, чем выше значение пропорционального регулятора, тем меньше ошибка.
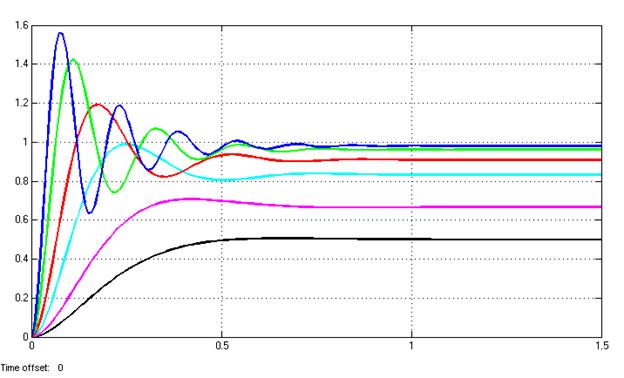
Рис. 3.2. Результаты моделирования переходной функции САУ для разных значений коэффициента пропорционального регулятора.
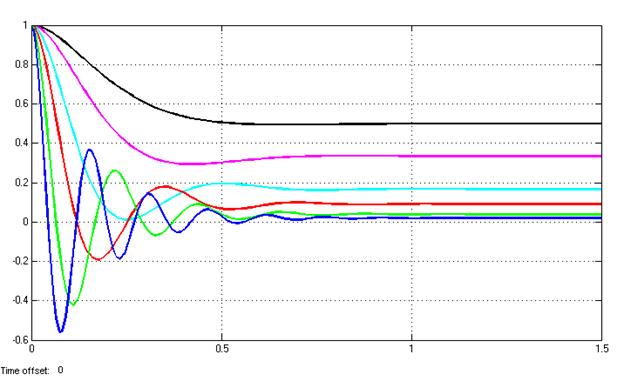
Рис. 3.3. Ошибка регулирования при значениях П-регулятора (1, 2, 5, 10, 25, 50), увеличивающегося сверху вниз.
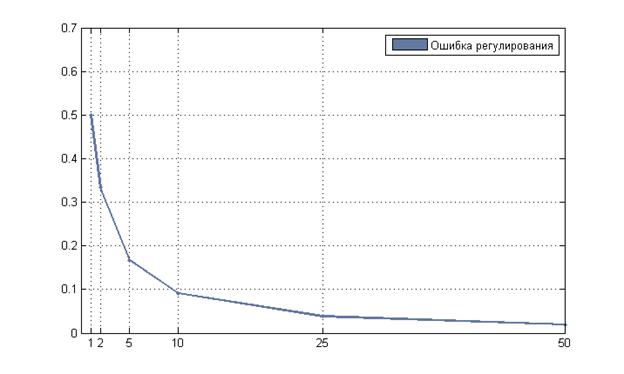
Рис. 3.4. Ошибка регулирования при изменении значения П-регулятора
Исследование САУ с И и ПИ-регуляторами
Для исследования работы САУ с И-регулятором вместо значения 1 в блоке Gain необходимо поставить 0, а вместо числителя интегратора задать отличное от нуля число (для начала равное 1).
Смоделируем САУ с И-регулятором и пронаблюдаем величину статической ошибки.
В случае набора параметров САУ, представленных на рис. 3.5, получим переходную характеристику рис. 3.6 и ошибку регулирования 3.7. Из результатов модерирования видно, что наличие интегрального регулятора позволяет избавиться от статической ошибки и получить на выходе системы заданную величину.
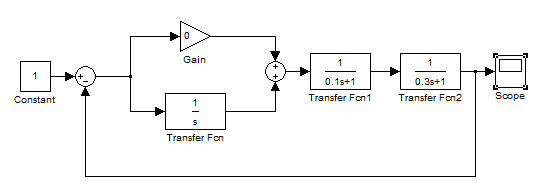
Рис. 3.5.
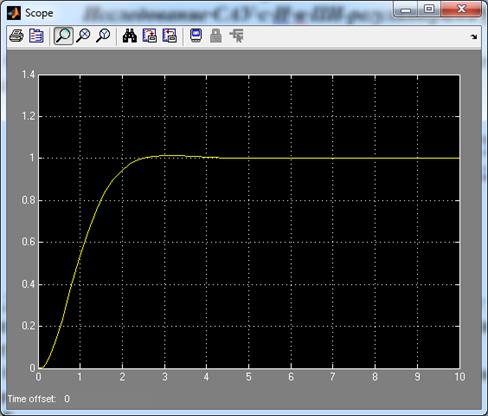
Рис. 3.6. Переходная характеристика САУ
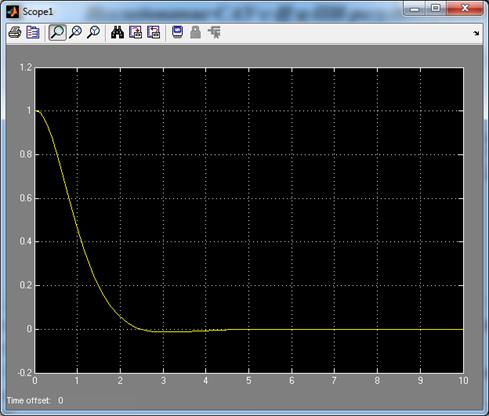
Рис. 3.7. Ошибка регулирования САУ
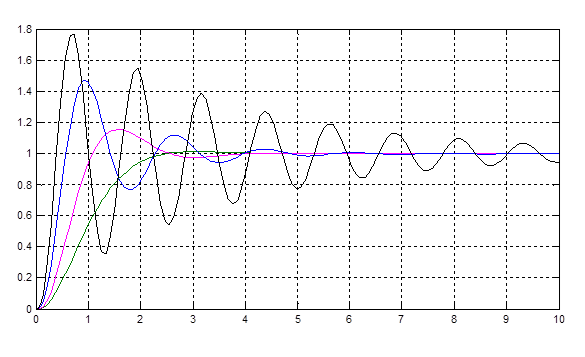
Анализ работы САУ с учетом значений коэффициента передачи регулятора  равного 1,2,5,10 представлены на рис. 3.8. Можно увидеть, что с ростом коэффициента Ки происходит увеличение колебательности выходного сигнала, а при превышении критического значения – в САУ наблюдаются расходящиеся колебания (рис.3.9).
равного 1,2,5,10 представлены на рис. 3.8. Можно увидеть, что с ростом коэффициента Ки происходит увеличение колебательности выходного сигнала, а при превышении критического значения – в САУ наблюдаются расходящиеся колебания (рис.3.9).