
Рис. 2.1. Результаты моделирования САУ (верхний график – исходная САУ, нижний – итоговая САУ)








Контрольные вопросы
1. Что такое структурная схема САУ?
2. Каким образом можно составить структурную схему САУ?
3. Поясните типовые способы преобразования структурных схем САУ.
4. Что такое сигнальный граф?
5. Какие основные команды MatLab могут быть использованы для структурных преобразований САУ?
ЛАБОРАТОРНАЯ РАБОТА № 3
ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ И КАЧЕСТВА
ЛИНЕЙНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Цель лабораторной работы - закрепление теоретических знаний по вопросам устойчивости и качества управления линейных систем автоматического управления (САУ) и практическое применение методов определения устойчивости и оценки качества линейных САУ.
Продолжительность лабораторной работы – 4 часа.
Работа предполагает решение следующих задач:
– расчет параметров линейной САУ в статическом режиме
– определение устойчивости линейной САУ
– поиск оптимальных параметров регулятора и моделирование переходных процессов в линейных САУ
- Порядок выполнения работы
1. Выберите параметры элементов САУ (табл. 3.1) в соответствии с вариантом индивидуального задания.
Таблица 3.1
| №№ | g | 
| 
| №№ | g |
|
| №№ | g |
|
|
| 1 | 0,5 | 0,2 | 0,19 | 6 | 3 | 0,3 | 0,14 | 11 | 5,5 | 0,4 | 0,15 |
| 2 | 1 | 0,4 | 0,28 | 7 | 3,5 | 0,5 | 0,23 | 12 | 6 | 0,6 | 0,24 |
| 3 | 1,5 | 0,6 | 0,37 | 8 | 4 | 0,7 | 0,32 | 13 | 6,5 | 0,8 | 0,33 |
| 4 | 2 | 0,8 | 0,46 | 9 | 4,5 | 0,9 | 0,41 | 14 | 7 | 0,1 | 0,42 |
| 5 | 2,5 | 0,1 | 0,55 | 10 | 5 | 0,2 | 0,9 | 15 | 7,5 | 0,3 | 0,51 |
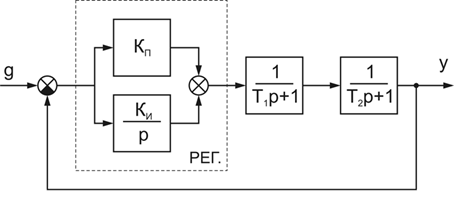
Рис. 3.1.
2. Для САУ с П-регулятором рассчитать и построить график зависимости e= f (  ) .
) .
3. Моделированием получить экспериментальную зависимость e= f ( ) для САУ с П-регулятором. Сопоставить результаты расчета с результатами моделирования.
4. Рассчитать область возможных (граничных) значений коэффициента передачи регулятора  (рис.3.1), при которых выполняется условие устойчивости САУ. Расчет выполнить отдельно для САУ с интегрирующим (И) регулятором и САУ с пропорционально-интегрирующим (ПИ) регулятором с учетом параметров звеньев в соответствии с индивидуальным заданием.
(рис.3.1), при которых выполняется условие устойчивости САУ. Расчет выполнить отдельно для САУ с интегрирующим (И) регулятором и САУ с пропорционально-интегрирующим (ПИ) регулятором с учетом параметров звеньев в соответствии с индивидуальным заданием.
5. Смоделировать САУ с И и ПИ-регуляторами. Пронаблюдать величину статической ошибки, сделать выводы.
6. Проверить на модели выполнение условий устойчивости для САУ с И и ПИ-регуляторами. Сделать вывод об устойчивости САУ.
7. Смоделировать САУ с большей величиной коэффициента передачи регулятора, чем его граничное значение, определенное в п.4 программы. Пронаблюдать поведение неустойчивой САУ.
8. Для САУ с И и ПИ-регуляторами определить экспериментальные зависимости интегральной оценки от коэффициента передачи регулятора J0=f( ) и построить их графики.
9. По графикам  (п.8 программы) определить оптимальные значения
(п.8 программы) определить оптимальные значения 
10. Для САУ с И и ПИ-регуляторами исследовать переходные процессы при различных значениях . Для каждого переходного процесса определить типовые показатели качества: величину перерегулирования, время переходного процесса и колебательность.
- Пояснения к выполнению работы
1. В САУ с ПИ-регулятором коэффициент передачи пропорционального звена считать равным номеру варианта.
2. Для САУ с П-регулятором, И-регулятором и ПИ-регулятором целесообразно создать отдельные модели в Matlab-Simulink, отличающиеся набором звеньев в блоке «РЕГ.» (рис. 1).
3. График зависимости e= f ( ) необходимо строить вручную по результатам моделирования САУ с П-регулятором. Для построения графика проводится серия численных экспериментов на модели при различных значениях  . В каждом эксперименте определяется величина ε , которая наносится на координатную сетку. Число точек (экспериментов) определяется произвольно, исходя из внешнего вида графика.
. В каждом эксперименте определяется величина ε , которая наносится на координатную сетку. Число точек (экспериментов) определяется произвольно, исходя из внешнего вида графика.
4. Определение граничного значения коэффициента передачи регулятора по п. 4 программы выполнить, используя критерий Гурвица для определения устойчивости замкнутых САУ.
5. Для определения интегральной оценки необходимо дополнить модели САУ фрагментом структурной схемы, показанной на рис. 2, и подключить входы g и y к задающему воздействию и выходу САУ соответственно. Экспериментальное определение и построение графика = f (  ) выполняется также, как и в п. 3 пояснений. При этом диапазон изменений выбирается произвольно, но с учетом
) выполняется также, как и в п. 3 пояснений. При этом диапазон изменений выбирается произвольно, но с учетом  (см. п. 4 программы).
(см. п. 4 программы).
6. При выполнении п. 10 программы для каждого типа САУ моделируются три переходных процесса: а) при =0,2 ; б) при = ; в) при = 2  , где – оптимальное значение , определяемое по п. 9 программы.
, где – оптимальное значение , определяемое по п. 9 программы.
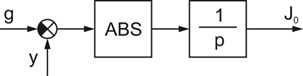
Рис. 3.2.
- Содержание отчета
Отчет о выполнении работы должен содержать:
1. Расчет и график зависимости e= f ( ) по п. 2.
2. Экспериментальный график зависимости e= f ( ) и выводы о соответствии его расчетному.
3. Расчет граничных коэффициентов передачи регулятора по п. 4.
4. График зависимости = f ( ) по п. 8 и оптимальные значения по п. 9.
5. Семейства переходных процессов и их показатели качества по п. 10.
6. Выводы о влиянии типа регулятора и его параметров на работу САУ в различных режимах и ее устойчивость.
Методический пример в Matlab
Рассмотрим пример со следующим набором параметров:
| g |
|
|
| 1 | 0,1 | 0,3 |