
Рассмотрим, как могут изменяться координаты системы: - отклонение, U - управляющее воздействие, Y - выходная величина при включении системы в работу и при изменении возмущающего воздействия F.








Техническое задание.
Данные на курсовую работу.
Вариант 7.
| Номинальный момент | 
| 
| 47.7 |
| Номинальная частота вращения | 
| 
| 600 |
| Номинальная мощность | 
| 
| 3 |
| Номинальное напряжение якоря | 
| 
| 70 |
| Номинальный ток якоря | 
| 
| 50 |
| Максимальная частота вращения | 
|
| 2000 |
| Электромеханическая постоянная времени | 
| 
| 12.3 |
| Электромагнитная постоянная времени | 
|
| 7.85 |
| Метод настройки | ТО | ||
Дать краткое описание системы двигателя постоянного тока.
Рассчитать и построить статические характеристики САУ.
Настроить систему на ТО.
Рассчитать и построить переходные процессы тока и скорости при управляющем воздействии и возмущающем воздействии.
Теоретическая часть
Описание САУ постоянного тока.
Системы управления разделяются на разомкнутые и замкнутые системы. Управление по разомкнутому циклу осуществляется без контроля результата.
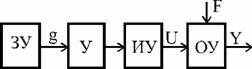
Рис. 1 Функциональная схема разомкнутой САУ
Такое управление называется жестким. Разомкнутые системы применяются для стабилизации и программного управления. Здесь ЗУ - задающее устройство; У - усилитель; ИУ - исполнительное устройство; g - задающее воздействие; U - управляющее воздействие; Y - выходная величина; F - возмущающее воздействие.
Задающее устройство вырабатывает задающее воздействие g, в соответствии, с которым устанавливается управляющее воздействие U. Управляющим называется воздействие, которое вырабатывает исполнительное устройство (исполнительный элемент). Это воздействие поступает на объект управления и определяет значение выходной величины. На объект управления кроме управляющего всегда действует другое воздействие, называемое возмущающим. Возмущающих воздействий может быть несколько. Возмущающее воздействие нарушает связь между управляющим воздействием и выходной величиной объекта. При постоянном задающем воздействии g изменение возмущающего воздействия F вызывает изменение выходной величины Y. Большинство устройств систем управления являются инерционными.
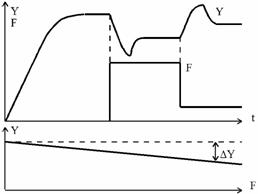
Рис. 2. - Изменение выходных величин объекта при изменении возмущающего воздействия. Нагрузочная характеристика САУ.
Установившийся режим работы наступает лишь по истечении некоторого времени. В установившемся режиме работы свойства системы можно охарактеризовать с помощью нагрузочной характеристики. Нагрузочная характеристика представляет собой зависимость выходной величины системы от возмущающего воздействия  . В разомкнутой системе нагрузочная характеристика - это характеристика объекта. Она не зависит от других элементов (усилителя, исполнительного устройства). Любые изменения возмущающего воздействия вызывают изменения выходной величины. Разомкнутую систему можно оценить по величине отклонения выходного сигнала
. В разомкнутой системе нагрузочная характеристика - это характеристика объекта. Она не зависит от других элементов (усилителя, исполнительного устройства). Любые изменения возмущающего воздействия вызывают изменения выходной величины. Разомкнутую систему можно оценить по величине отклонения выходного сигнала  под влиянием возмущающего воздействия F.
под влиянием возмущающего воздействия F.
В замкнутых САР управляющее воздействие формируется в непосредственной зависимости от управляемой величины.
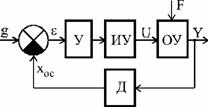
Рис. 3 – Функциональная схема замкнутой САР.
В замкнутой системе сигнал с выхода датчика Д, измеряющего выходную величину, поступает на вход системы. Такая связь входа системы с его выходом называется обратной связью. Сигнал на входе усилителя равен  .
.
Здесь  - отклонение сигнала обратной связи
- отклонение сигнала обратной связи  от задающего воздействия. Если из задающего воздействия g вычитать выходную величину Y, то
от задающего воздействия. Если из задающего воздействия g вычитать выходную величину Y, то  будет представлять отклонение регулируемой величины от заданного значения.
будет представлять отклонение регулируемой величины от заданного значения.
Рассмотрим, как могут изменяться координаты системы: - отклонение, U - управляющее воздействие, Y - выходная величина при включении системы в работу и при изменении возмущающего воздействия F.
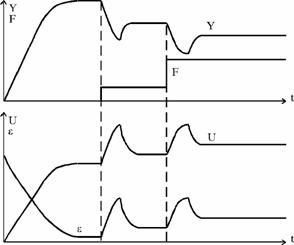
Рис. 4 – Изменение координат системы.
Будем полагать, что зависимости получены при коэффициенте усиления усилителя k1. Работу системы можно описать следующим образом. При включении системы, когда  = 0, величина отклонения ε имеет максимальное значение. Управляющее воздействие U начинает увеличиваться, вследствие чего увеличивается выходная величина Y. По мере увеличения Y отклонение ε уменьшается и наступает установившийся режим работы. Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины.
= 0, величина отклонения ε имеет максимальное значение. Управляющее воздействие U начинает увеличиваться, вследствие чего увеличивается выходная величина Y. По мере увеличения Y отклонение ε уменьшается и наступает установившийся режим работы. Увеличение F вызывает уменьшение выходной величины Y и увеличение отклонения ε, что приводит к увеличению управляющего воздействия U и, следовательно, к увеличению выходной величины.
Однако Y не может достичь прежнего значения, так как увеличение управляющего воздействия возможно лишь при увеличении . Увеличим коэффициент усиления усилителя. Пусть k2 > k1. Рассмотрим изменение координат в этом случае.
В замкнутой системе управляющее воздействие U формируется в функции отклонения ε. Замкнутые системы называются системами автоматического регулирования по отклонению.
В замкнутой системе регулирования, выбирая необходимое значение коэффициента усиления можно получить требуемую нагрузочную характеристику. В рассмотренной системе с увеличением возмущающего воздействия уменьшается выходная величина. Каждому новому значению возмущающего воздействия соответствует новое значение выходной величины. Такое регулирование называется статическим. Система автоматического регулирования, имеющая подобную нагрузочную характеристику, называется статической системой.
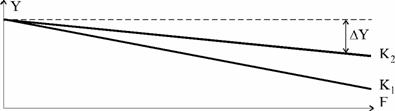
Рис. 5 – Нагрузочные характеристики замкнутой САУ.
В замкнутой системе отклонение равно . Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
При изображении систем управления применяют два принципа функциональный и структурный принцип и соответственно схемы подразделяются на функциональные и структурные схемы.
1. Расчёт статических характеристик системы
1.1 Структурная схема электропривода
Для исследования статических характеристик принимаем структурную схему электропривода, которая имеет следующий вид:
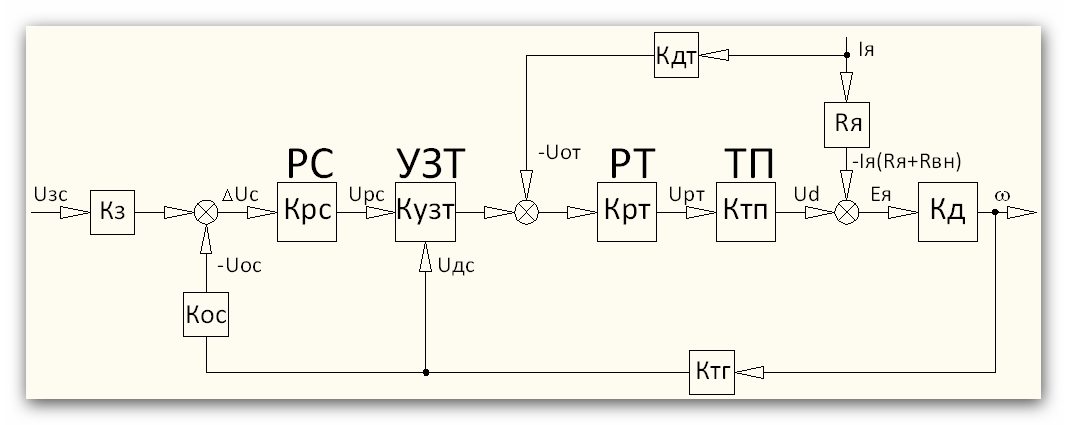
Рис. 6 – структурная схема для расчёта статики.
В структурной схеме есть следующие обозначения:
РС – регулятор скорости;
УЗТ – устройство зависимого токоограничения;
РТ – регулятор тока;
ТП – тиристорный преобразователь;
 – коэффициент усиления двигателя;
– коэффициент усиления двигателя;
 – напряжение потенциометрического задатчика скорости на входе РС;
– напряжение потенциометрического задатчика скорости на входе РС;
 – напряжение обратной связи по скорости;
– напряжение обратной связи по скорости;
 – коэффициент передачи потенциометрического делителя в цепи тахогенератора;
– коэффициент передачи потенциометрического делителя в цепи тахогенератора;
 – напряжение на выходе РС;
– напряжение на выходе РС;
 – напряжение, снимаемое с датчика скорости ДС (тахогенератор);
– напряжение, снимаемое с датчика скорости ДС (тахогенератор);
 – коэффициент обратной связи по току;
– коэффициент обратной связи по току;
 – коэффициент передачи тахогенератора;
– коэффициент передачи тахогенератора;
 – напряжение на выходе РТ;
– напряжение на выходе РТ;
 – выпрямленное напряжение;
– выпрямленное напряжение;
 – ЭДС якоря.
– ЭДС якоря.
 – коэффициент усиления регулятора скорости;
– коэффициент усиления регулятора скорости;
 – коэффициент передачи УЗТ;
– коэффициент передачи УЗТ;
 – коэффициент усиления регулятора тока;
– коэффициент усиления регулятора тока;
 – коэффициент усиления ТП.
– коэффициент усиления ТП.
Для определения будем рассматривать электромеханические характеристики в диапазоне допустимых перегрузок, когда равен единице.
В разомкнутой по скорости системе коэффициент  ,
,  . Уравнение статики:
. Уравнение статики:


где  – заданное значение выходной координаты, определяемое задатчиком,
– заданное значение выходной координаты, определяемое задатчиком,  - статическая ошибка регулирования в разомкнутой системе, зависящая от возмущающего воздействия.
- статическая ошибка регулирования в разомкнутой системе, зависящая от возмущающего воздействия.
Основные уравнения замкнутой системы (  ,
,  ):
):
 ,
,
где  – сигнал ошибки на входе РС;
– сигнал ошибки на входе РС;
Подставляем второе уравнение системы в первое:
 , где
, где
 В – задающее напряжение на входе РС;
В – задающее напряжение на входе РС;

 – напряжение обратной связи по скорости.
– напряжение обратной связи по скорости.
 – ЭДС источника задающего сигнала;
– ЭДС источника задающего сигнала;
 – сопротивление резисторов на входе РС;
– сопротивление резисторов на входе РС;
 – внутренние сопротивления задающего источника и тахогенераторы;
– внутренние сопротивления задающего источника и тахогенераторы;
 – полное сопротивление потенциометров в цепях задания и тахогенератора;
– полное сопротивление потенциометров в цепях задания и тахогенератора;
 – регулируемое сопротивление задатчика, который фиксируется в четырёх положениях – 5000, 10000, 15000 и 20000 Ом. Наибольшая скорость
– регулируемое сопротивление задатчика, который фиксируется в четырёх положениях – 5000, 10000, 15000 и 20000 Ом. Наибольшая скорость  при
при  ;
;
 – регулируемое сопротивление потенциометра в цепи тахогенератора,
– регулируемое сопротивление потенциометра в цепи тахогенератора,
 – сопротивление, при котором электромеханическая характеристика проходит через точку ( ;
– сопротивление, при котором электромеханическая характеристика проходит через точку ( ;  );
);
 кОм – сопротивление тахогенератора.
кОм – сопротивление тахогенератора.
Тогда
 , где
, где
 – заданное значение выходной координаты в замкнутой системе,
– заданное значение выходной координаты в замкнутой системе,  – статическая ошибка регулирования в замкнутой системе.
– статическая ошибка регулирования в замкнутой системе.
Известно, что в замкнутой системе статическая ошибка регулирования меньше, чем в разомкнутой в  раз, то есть
раз, то есть  .
.
Суммарный петлевой коэффициент усиления найдём из выражения:
 62, где
62, где
 ;
;
 ;
;
 –макс. выпрямленное напряжение;
–макс. выпрямленное напряжение;
 – коэффициент преобразования схемы выпрямления по напряжению;
– коэффициент преобразования схемы выпрямления по напряжению;
 – максимальное управляющее напряжение;
– максимальное управляющее напряжение;
 – для ДПТ параллельного возбуждения;
– для ДПТ параллельного возбуждения;

 = 0,098 Ом;
= 0,098 Ом;
 ;
;
 5
5  - коэффициент передачи датчика тока, согласно тех. паспорту.
- коэффициент передачи датчика тока, согласно тех. паспорту.
 – максимальная относительная статическая ошибка регулирования в замкнутой системе, принимается равной 2÷3 %;
– максимальная относительная статическая ошибка регулирования в замкнутой системе, принимается равной 2÷3 %;
 – диапазон регулирования скорости;
– диапазон регулирования скорости;
 – скорость идеального холостого хода.
– скорость идеального холостого хода. 
Искомое значение находим по формуле:

 ;
;
Устройство зависимого токоограничения УЗТ предназначено для быстродействующей защиты преобразователя от токовых перегрузок в функции напряжения на якоре двигателя (частоты вращения его вала). Для наиболее полного производительного использования двигателя по току (мощности) УЗТ меняет уставку токоограничения при регулировании в соответствии с перегрузочной характеристикой двигателя. Известно, что высокомоментные двигатели имеют обратно-пропорциональную перегрузочную характеристику  . С этой целью УЗТ ограничивает задающий сигнал на входе контура тока в функции сигнала , поступающего с тахогенератора ДС. Ограничение осуществляется путём шунтирования выхода РС с помощью двух шунтирующих диодов.
. С этой целью УЗТ ограничивает задающий сигнал на входе контура тока в функции сигнала , поступающего с тахогенератора ДС. Ограничение осуществляется путём шунтирования выхода РС с помощью двух шунтирующих диодов.
Для формирования требуемой перегрузочной характеристики привода  необходимо определить значения входных сопротивлений УЗТ, то есть коэффициенты
необходимо определить значения входных сопротивлений УЗТ, то есть коэффициенты  и
и  .
.
Напряжение подпора диодов УЗТ изменяется по закону:
 ,
,
где  – максимальное опорное напряжение;
– максимальное опорное напряжение;
 – относительное положение движка потенциометра;
– относительное положение движка потенциометра;
 – относительное положение движка потенциометра
– относительное положение движка потенциометра
Зависимость  определяет максимальное напряжение на якоре двигателя. Эта зависимость линейная (обратно-пропорциональная), поэтому её можно задать по двум точкам. При скорости, равной нулю, равна нулю и противо-ЭДС якоря, поэтому можем записать:
определяет максимальное напряжение на якоре двигателя. Эта зависимость линейная (обратно-пропорциональная), поэтому её можно задать по двум точкам. При скорости, равной нулю, равна нулю и противо-ЭДС якоря, поэтому можем записать:
 ,
,
где  – максимально допустимый ток;
– максимально допустимый ток;
 – коэффициент допустимой перегрузки по току;
– коэффициент допустимой перегрузки по току;
 – коэффициент передачи обратной связи по току электропривода ;
– коэффициент передачи обратной связи по току электропривода ;
 – сопротивление на входе датчика тока ДТ по цепям задания и обратной связи.
– сопротивление на входе датчика тока ДТ по цепям задания и обратной связи.
Далее приравнивая два выражения при  , определяем :
, определяем :
 ,
, 

Вторую точку графика найдём при скорости  . Пользуясь структурной схемой, можно записать:
. Пользуясь структурной схемой, можно записать:
 .
.
Принимаем  .
.
 – Номинальная частота вращения;
– Номинальная частота вращения;
Откуда
 .
.
Теперь по точкам (I ;ω), (I; ω =0) можем построить перегрузочную прямую:
Рис. 7 – график перегрузочной характеристики УЗТ.