
Егер болса онда, шартын беріп, (14) формуладан Lяц жаңа мәнін табу керек, ал сонан соң (10) бойынша тегістеуші дросселдің индуктивтілігін Lдр табады.








Жиі жүргізілетін және тежелетін режимінде жұмыс істейтін жүйені есептегенде, Lят индуктивтілігін шекаралық үзіліссіз ток бойынша тексерудің қажеті жоқ.
3.3 Жетектің параметірлерін анықтау және электромеханикалық сипаттамалар тұрғызу
Түрлендіргіштің эквиваленттік ішкі кедергісі
Rпр=RТ+п × RдТ+Rк . (15)
Көпірлі сұлба үшін RТ екі есе көп болады (екі фазалық ораманың кедергісі). Коммутациялық кедергінің мәні
 . (16)
. (16)
Мұнда m – фазалар саны (көпірлік сұлба үшін m=6), n шамасы тізбектеп жалғанған тиристорлар санын көрсетеді (көпірлік сұлба үшін екі еселенген).
Якорь тізбегінің электромагниттік тұрақтысы
Т я =(Lдр+Lя+LТ)/R (17)
мұнда Rэ якорь тізбегінің эквиваленттік кедергісі
Rэ=Rя+Rпр. . (18)
Қозғалтқыш тұрақтысы
 . (19)
. (19)
Уақыттың электромеханикалық тұрақтысы
 . (20)
. (20)
Онан соң ажыратылған жүйелі жетектің статикалық электромеханикалық сипаттамасын есептеу жүргізіледі. Номинал жылдамдық пен номинал жүктеме кезіндегі түрлендіргіштің ЭҚК
 .
.
Мұнда  – тиристорлардың өткелдерінде және қозғалтқыштың щеткалық түйіспелерінде кернеудің түісуі.
– тиристорлардың өткелдерінде және қозғалтқыштың щеткалық түйіспелерінде кернеудің түісуі.
Ток өзгерген кездегі статикалық сипаттама келесі формула бойынша тұрғызылады
 . (21)
. (21)
Минимал жылдамдық пен номинал жүктеме кезіндегі түрлендіргіштің ЭҚК
 . (22)
. (22)
Ток өзгерген кездегі минимал жылдамдық үшін статикалық сипаттама келесі формула бойынша тұрғызылады
 . (23)
. (23)
Жоғарғы және төменгі статикалық сипаттамалар (21), (23) формулалар бойынша тұрғызылады және бір графикте келтіріледі.
4 Жылдамдық бойынша үзілу тогы бойынша теріс кері байланысы бар екі контурлы электр жетегінің жүйесі
Осыған дейінгі есептеулерде байқағанымыздай, вентильмен түрлендіретін электр жетегінің механикалық сипаттамасы қатысты түрде аз. Осыған байланысты тұрақты токтың вентильдік жүйедегі электр жетектерінің жылдамдықты реттеу аралығын кеңейту мақсатында кері байланыстар пайдаланылуы мүмкін, атап айтқанда якорь тогы бойынша оң немесе жылдамдықпен кернеу бойынша теріс. Вентильдік түрлендіргіш пен қозғалтқыш якоріндегі токты тежеу мақсатында ток (токтық үзіліс) бойынша ұсталған теріс кері байланыс қолданылуы мүмкін. Бұл жағдайда электр жетегі эксковаторлық сипаттамаға ие болады.
Жылдамдық бойынша және ток үзілу (ұсталған кері байланыс) бойынша теріс кері байланысы бар АЭЖ 3 суретте көрсетілген.
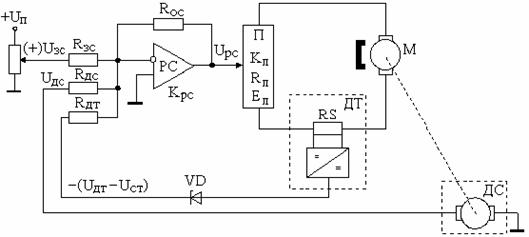
3 Сурет
Якорь тогының шамасына тәуелді, жетектің екі жұмыс режімі болуы мүмкін:
а) I < IОТС, ½UДТ½< UСТ VD.
Токтың жұмыс диапазонында жылдамдық бойынша тек қана бір теріс кері байланыс жұмыс істейді (ток бойынша кері байланыс сигналы күшейткішке келмейді). Онда басқару кернеуі RЗС = RДС кезде тең
Uy = (UЗС – UДС) × КРС . (24)
Түрлендіргіштің ЭҚК қозғалтқыштың ЭҚК және эквиваленттік кедергіге түсетін кернеумен теңгеріледі
Е П = Uу × КП = Е + I × RЭ. (25)
МұндаЕ = k × ФН × ω – ТТҚ якоріндегі ЭҚК;
КП – түрлендіргіштің күшейткіш коэффициенті.
Жылдамдық датчигінің кернеуі қозғалтқыш якорының айналу жиілігіне пропорционал болады
UДС = КДС × ω . (26)
(24), (25) және (26) теңдеулерін біріктіріп шешкенде, жылдамдық бойынша теріс кері байланысы бар жетектің электромеханикалық сипаттамасының бірінші бөлігі үшін (27) өрнекті алады
(UЗС – КДС × ω ) × КРС × КП = k × ФН × ω + I × RЭ ,
UЗС × КРС × КП + КДС × ω × КРС × КП = k × ФН × ω + I × RЭ ,
 . (27)
. (27)
Мұнда Кд = 1/kФН – қозғалтқыштың беріліс коэффициенті;
б) I > IОТС, ½UДТ½> UСТ VD.
Токтың бұл диапазонында жылдамдық реттегіштің кірмесінде кері байланыстың екі сигналы әсер етеді:
- жылдамдық бойынша сигнал, ол жылдамдықтық сипаттаманы қатаңдатуға ұмтылады;
- ток бойынша сигнал, ол жылдамдықтық сипаттаманы жұмсартуға ұмтылады.
Қажетті сипаттама алу үшін ток бойынша кері байланыс басым болуы керек. Басқару сигналы төмендегідей болады
Uy = (UЗС – UДС – UДТ + UСТ) × КРС (28)
мұнда UДТ = b× I × RЭ ток датчигінін сигналы;
UСТ – стабилитроның тесу кернеуі (25), (26) және (28) теңдеулерді біріктіріп шешіп, жылдамдық пен ток бойынша кері байланыстары бар кездегі жетектің электромеханикалық сипаттаманың екінші бөлігі үшін (29) өрнекті аламыз
[UЗС – ω × КДС – b× I × (Ra + RП) + UСТ] × КРС × КП = се × ФН × ω + I × (Ra + RП),
 . (29)
. (29)
Жылдамдық бойынша және ток үзілісі бойынша теріс кері байланысы бар екі контурлы жүйенің статикалық сипаттамасы 4 суретте көрсетілген.
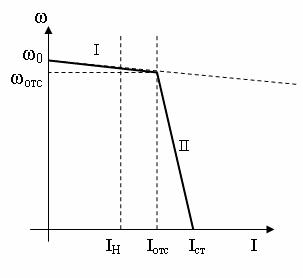
4 Сурет
Осындай сипаттаманы тұрғызу үшін, түрлендіргіштің, жылдамдық датчиктерінің және ток реттегіштердің параметрлерін есептеу қажет.
4.1 Басқарылатын түзеткіш, АБЖ звеносы ретінде
Басқарылатын түзеткіштің сипаттамалық қасиеттерін талдағанда оның құрылыстық сұлбасын екі тізбектеп қосылған звенолар түрінде көрсеткен ыңғайлы (5 сурет) : Импульсті – фазалық басқару жүйесі (ИФБЖ) және жеке тиристорлық түрлендіргіш (күштік блоктың). ИФБЖ кірмелік сигналы басқару Uу кернеуі болады, ол тиристорларды реттеуші бұрышқа λ түрленеді және күштік блоктың шықпасындағы түзетілген кернеудің Ud орташа мәнін анықтайды.
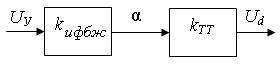
5 Сурет
ИФБЖ беру коэффициенті реттегіш бұрыштың өсуінің басқарушы кернеудің өсуіне қатынасымен анықталады.
 . (30)
. (30)
Жеке тиристорлық түрлендіргіштің беру коэффициенті түзетілген кернеудің орташа мәнінің өсуінің тиристорларды басқару бұрышының өсуіне қатынасына тең
 . (31)
. (31)
Басқарылатын түзеткіштің толық күшейткіш коэффициенті түзетілген кернеудің орташа мәнінің өсуінің басқару кернеуіне қатынасына тең
 (32)
(32)
және құрылыстық сұлбаға сәйкес
 . (33)
. (33)
Тиристорлық түрлендіргіштің күшейткіш коэффицентін анықтау әдісі ИФБЖ статикалық сипаттамасының түріне тәуелді болады. Осы уақыт ішінде әртүрлі фаза ығыстыру принціпі бар ИФБЖ көптеген варианттары жасалған. Оларды іске асыру үшін аналогтық немесе сандық элементтер қолданылады.
Импульсті – фазалық басқару жүйесінің сипаттамасы сызықты болған жағдайда, түрлендіргіштің күшейткіш коэффициентін, алдымен жеке звенолардың kТП және kСИФУ беру коэффициенттерін анықтап (33) өрнек бойынша есептеген ыңғайлы. ИФБЖ беру коэффициентін есептегенде (30) өрнекке ашылу бұрышының өсуші мәнін еркі бойынша береді, ол үшін басқаратын кернеудің өсуші мәні белгілі. Жеке тиристорлық түрлендіргіштің беру коэффициентін анықтау үшін Еd =f(α) сипаттама тұрғызады. Бұл сипаттаманың түрі түзету сұлбасы мен жүктеме сипатына тәуелді болады. Әдетте сұлбаның активті – индуктивті жүктемемен істелінген жұмысын талдаған кезде индуктивті Lн жүктеменің мәнін шексіз үлкен етіп алады, ол негізі есептеулерді әлдеқайда ықшамдайды. Сипаттаманың жұмыстақ бөлігін жоғарда қарастырғандағыдай таңдайды. Іздестірілетін беру коэффициентін өрнек бойынша есептейді.
Кейбір түрлендіргіште арккосинусойдалы деп аталатын сипаттамалары бар импульсті – фазалық басқару жүйесі пайданылады, ол жұмыстық диопазонмен шектелетін E d = f(Uy) сызықты тәуелділігін алуға мүмкіндік жасайды. Бұл жағдайда тиристорлық түрлендіргішті анықтаған кезде (30) формулаға ашылу бұрышының өз еркімен алған мәнін қояды, ол үшін басқару кернеуінің өсу шамасы белгілі.
Тиристорлық турлендіргіш электр жетегінің құрылыстық сұлбасының элементі ретінде динамикалық режимде беруші функциялы инерттік звеноның қасиетіне ие болады
 . (34)
. (34)
Уақыт тұрақтылығының шамасы  көптеген факторларға тәуелді, оларды ескеру өте күрделі болады. Сондықтан практикалық есептеулерде
көптеген факторларға тәуелді, оларды ескеру өте күрделі болады. Сондықтан практикалық есептеулерде  шамасын 0,005 тен 0,015 сек. дейінгі аралықта алады.
шамасын 0,005 тен 0,015 сек. дейінгі аралықта алады.
4.2 Басқарылатын түзеткіштің статикалық сипаттамаларын есептеуге мысал.
Берілгені:
- түрлендіргіш көпір сұлбасы бойынша жиналған, kсх=2.34;
- Uс = 220 B – трансформатордың вентильдік орамасының фазалық кернеуі;
- UУmax = 10 В – басқарушы кернеудің қабылданған максимал мәні.
ИФБЖ арккосинусойдалы сипаттамасында инвертордың реттеуші бұрышы
 . (35)
. (35)
ТТ көпірлік сұлбасы кезіндегі түзеткіштің ЭҚК
 . (37)
. (37)
ИФБЖ әртүрлі варианттары кезіндегі инвертордың күшейткіш коэффиценттерін анықтау үшін (35), (36), (37) формулаға сәйкес "Mathcad". қолданып орындалған программаны пайдаланып есептеуге болады. «1» индекспен сызықтық ИФБЖ варианты берілген.
Берілгендері:
Uc=220 B – трансформатордың екінші реттік фазалық кернеуі;
Kc=2.34 – көпірлік сұлба коэффициенті;
Uy.max=10 B – максимал басқарушы кернеу.
Шешуі:
Ed0=kcUc максимал түзетілген кернеу;
 арккосинусоидалық сипаттама ИФБЖ;
арккосинусоидалық сипаттама ИФБЖ;
 тікбұрышты сипаттама ИФБЖ.
тікбұрышты сипаттама ИФБЖ.
Арккосинусойдалы ИФБЖ бар ТТ сипаттамасы
 .
.
Төртбұрышты ИФБЖ бар ТТ сипаттамасы
 .
.
Арккосинусойдалы ИФБЖ бар инвентордың 
 .
.
Төртбұрышты ИФБЖ бар инвентордың
 .
.
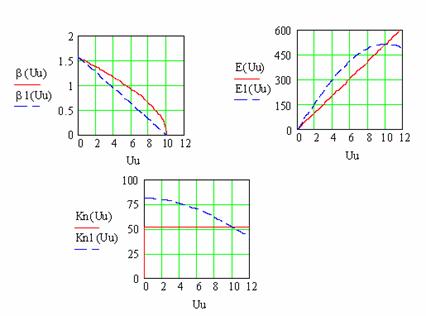
5 Сурет – Басқарылатын түзеткіштің статикалық сипаттамаларын есептеу
5 суретте ИФБЖ (а), түрлендіргіштің (б) реттемелік сипаттамаларын және түзеткіштің беру коэффициентін (с) есептеу нәтижесі көрсетілген.
Суретте тұтас сызықпен ИФБЖ арккосинусты кезіндегі, кесінді – ИФБЖ сызықты кезіндегі түзеткіштің сипаттамалары берілген. Бірінші жағдайда – тұрақты шама, екіншіде – реттеу диапазонында өзгереді. Есептеулерді онан ары жалғастыру үшін түзеткштің ЭҚК реттейтін аймақты нақты механизм үшін беруге болады және осыған сәйкес мәнін анықтайды.
4.3 Кері байланыстардың параметрлерін анықтау.
Номинал жүктеме кезінде ажыратылған жүйеде жылдамдықтың құлауы
 . (38)
. (38)
Тұрақталған жүйеде жылдамдықтың берілген құлауы
 (39)
(39)
мұнда  – қатысты бірліктегі статикалық қателік.
– қатысты бірліктегі статикалық қателік.
(27) бойынша тұйықталған жүйеде жылдамдықтың азаюы
 (40)
(40)
мұнда Кд = 1/kФН – қозғалтқыштың беру коэффициенті.
Онда жылдамдық бойынша қажетті теріс кері байланыс коэффициенті
 . (41)
. (41)
Күшейту коэффициенті мәні  кездегі түрлендіргіштің реттемелік сипаттамасынан алынады. Кері байланыстың қажетті коэффициенті бойынша тахогенератор таңдалады.
кездегі түрлендіргіштің реттемелік сипаттамасынан алынады. Кері байланыстың қажетті коэффициенті бойынша тахогенератор таңдалады.

және жылдамдықты реттейтін күшейту коэффициенті есептеледі
 . (42)
. (42)
4.4 Жылдамдық бойынша және үзілу тоғы бойынша теріс кері байланысы бар жетекті есептеу және сипаттамаларын тұрғызу
Жоғарыда ұсынған сұлбаны пайдаланған кезде, қозғалтқыштың статикалық сипаттамасының түрі, 4 суретте көрсетілгендей болады және екі бөліктен тұрады.
1 бөлікте I<Iүзіл, үзілу тоғы жұмыс істемейді. АБЖ берілген жылдамдықты тұрақты ұстап тұру режимінде жұмыс істейді. Жылдамдық жүктеме функциясы ретінде (27) теңдеуден, жылдамдық пен тоқты номинал мәндері кезіндегі, жоғары және төменгі сипаттамалардағы берілетін кернеу анықталады
 ,
,
 . (43)
. (43)
Бос жүріс жылдамдықтары жоғары және төменгі сипаттамалар үшін төмендегідей анықталады
 ,
,
 . (44)
. (44)
Жоғары және төменгі сипаттамалардағы үзілу жылдамдықтары Iһ=Iүзіл, кезге (27) теңдеу бойынша анықталады. Бірінші бөліктің электромеханикалық сипаттамасы 4 суретке сәйкес есептелген нүктелер бойынша тұрғызылады.
2 бөлікте I≥Iүзіл,, сондықтан үзілу тоғының әсерінен сипаттаманың иілуі (29) теңдеуге сәйкес өседі. Екінші бөліктің жоғарғы сипаттамасы берілген нүктелер ( Іүзіл.В, ωүзіл.В, Іст, ωст.) арқылы өту үшін, Uст кернеуін және β мәндерін I=Iүзіл,, болғандағы (27) теңдеуді және I=Iст болғандағы (29) теңдеуді біріктіріп шешіп табамыз.
 , (45)
, (45)
 . (46)
. (46)
Жүргізілген есептеулерге сәйкес, (29), (45), (46) теңдеулер бойынша тұрғызылған екінші бөліктің сипаттамасы, берілген нүктелер арқылы өтеді.
Әдебиеттер тізімі
1.Ковчин С.А., Сабинин Ю.А. Теория электропривода.-СПб.: Энергоатомиздат, 2000.- 496с.
2. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат, 1985.-360с.
3. Москаленко В.В. Автоматизированный электропривод. – М.: Энерго-атомиздат,1985. - 416 с.
4. Башарин А.В., Постников Ю.В. Примеры расчета автоматизированного электропривода на ЭВМ. - Л.: Энергоатомиздат, 1990.-512с.
Мазмұны
1 Курстық жұмысқа тапсырма
2 Электрлік қозғалтқышты таңдау және электромеханикалық сипаттамаларды есептеу
3 Күштік сұлбаның элементтерін есептеу және тандау
3.1 Күштік трансформатор мен түрлендіргіштің вентильдерінің қуатын есептеу және таңдау
3.2 Теңгеруші және тегістеуші редакторлардың ( дросселдердің) индуктивтіліктерін есептеу
3.3 Жетектің параметрлерін анықтау және электромеханикалық сипаттамалар тұрғызу
4 Жылдамдық бойынша үзілу тогы бойынша теріс кері байланысы бар екі контурлы электр жетегі жүйесі
4.1 Басқарылатын түзеткіш, АБЖ звеносы ретінде
4.2 Басқарылатын түзнткіштің статикалық сипатталарын есептеуге мысал
4.3 Кері байланыстардың параметрлерін анықтау
4.4 Жылдамдық бойынша және үзілу тоғы бойынща теріс кері байланысы бар жетекті есептеу және сипаттамаларын тұрғызу
Әдебиеттер тізімі