
Статическая устойчивость- способность системы восстанавливать исходный режим после малого его возмущения или режим весьма близкий к исходному (если возмущающее воздействие не снято)








1.Причины возникновения и последствия электромеханических переходных процессов. Простейшее определение устойчивости.
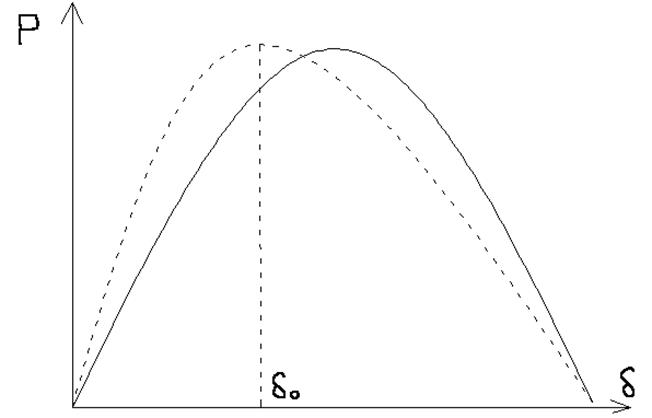
Нормальные переходные процессы возникают и при больших возмущениях в виде существенных изменений режима системы. Их причинами может быть изменения схемы соединения системы, появляющиеся например, при отключении агрегатов или линий электропередач несущих значительные нагрузки; при нормальном включении или отключении линии с большой зарядной мощностью; при включении генераторов методом самосинхронизации и т.д. При этом появляются такие значительные отклонения параметров режима от их исходного состояния, что учет наиболее существенных нелинейных зависимостей P=f(δ) становится в большинстве случаев обязательным.
Аварийные переходные процессы, вызванные короткими замыканиями и последующим отключением аварийных участков, а в некоторых случаях их повторными включениями, обязательно требуют при анализе учета нелинейностей. По отношению к большим возмущениям вводится понятия динамической устойчивости.
Статическая устойчивость- способность системы восстанавливать исходный режим после малого его возмущения или режим весьма близкий к исходному (если возмущающее воздействие не снято)
Динамическая устойчивость- способность системы восстанавливать после большого возмущения исходное состояние, практически близкое к исходному (допустимого по условию эксплуатации системы). Если после большого возмущения синхронная работа системы сначала нарушалась, а затем после некоторого, допустимого по условию эксплуатации асинхронного хода восстанавливается, то считается что система обладает результирующей устойчивостью.
2.Основные понятия и определения: электроэнергетическая система и ее элементы; режимы системы; требования к режимам.
Электроэнергетическая система - та часть энергетической системы, в которой теплота и различные виды энергии преобразуются в электрическую энергию, передаваемую на расстояние, распределяемую по потребителям, где она вновь преобразуется.
Электрическая система представляет собой совокупность взаимодействующих элементов, которые можно разбить на 2 группы:
-Силовые элементы, вырабатывающие (генераторы), преобразующие (трансформаторы, выпрямители, инверторы), передающие (ЛЭП, сети), и потребляющие энергию.
- Элементы управления, регулирующие и изменяющие состояние системы (регуляторы возбуждения синхронных машин, регуляторы частоты, реле, выключатели и т.д.)
Режим системы - совокупность процессов, существующих в системе и определяющих ее состояние в любой момент времени или некоторый интервал времени.
Режим характеризуется показателями, количественно определяющие условия работы энергосистемы. Их называют параметрами системы. К ним относятся: напряжение, ток, частота, cosφ и т.д. параметры режима связываются в математических уравнениях, соотношения, в которые входят параметры системы.
Режим системы может быть установившемся или переходным.
В установившемся режиме параметры электрической системы непрерывно меняются, но эти изменения происходят около некоторого среднего значения очень малые, и поэтому режим можно считать установившемся.
Виды режимов системы:
1) Нормальный установившейся режим, применительно к ним проектир. энергет. сист. и техно-эконом. показат.
2) Норм переходн режим – режим в течении которого система переходит из одного установ режима в другой.
3) Аварийный установившийся и переходной режим. Для которого определяются технические характеристики, связанные с необходимостью ликвидации аварий и выяснений условий дальнейшей работоспособности.
4) Послеаварийный режим – установившейся режим технико-экономические показатели которого хуже нормально устаноновившегося режима.
Требования предъявляемые к режимам:
1) качество потребляемой электроэнергии
2) надежность энергоснабжения потребителей, без перерыва и снижения качества
3) живучесть – способность противостоять воздействию внешних сил и длительное время сохранять это состояние.
4) экономичность
3.Классификация переходных процессов. Основные допущения, принимаемые при анализе и расчетах электромеханических переходных процессов.
Электрические системы нелинейные. Нелинейность определяется 2-мя причинами:
1) Зависимостью параметров системы от параметров режима.
2) нелинейность параметров между собой.
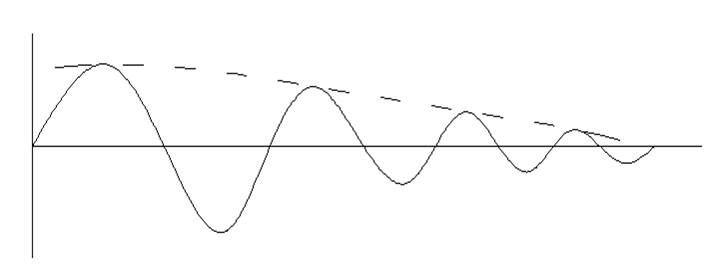
Кроме этого переменные величины токов и напряжений изменяются по синусоидальному закону. У процессов, связанных с несинусоидальным изменением параметров мгновенные значений не учитываются, а учитываются огибающие.
Расчеты с анализом мгновенных значений называются анализом по полным уравнениям с учетом влияния изменения мгновенных значений.
Нелинейность параметров системы обычно не учитываются.
При упрощении расчетов ПП как правило учитываются главные факторы, что важно для понимания физики явлений.
ПП можно классифицировать по ряду признаков:
- по условиям протекания; так в нормальных переходных режимах можно судить о нормальных ПП, в аварийных режимах об аварийных ПП.
- по причинам возникновения
- по видам возмущающих воздействий и значениям возмущений. Под возмущением при этом понимается отклонения от параметров режима, происходящие в начале ПП в связи с появлением новых, т.е. не проявляющихся ранее, факторов, изменяющих режимы.
- по допущениям, сделанным при составлении дифференциального уравнения, т.е. по полноте математических описаний.
- по скорости протекания процессов в системе, причем следует иметь в виду, что ПП, начавшиеся в момент возмущения режима, в линейной системе теоретически длятся бесконечно.
- по структуре исследуемой системы, которая может быть или простой, содержащей радиальные передачи, или сложной, состоящих из ряда параллельных коэфф.
- по допущениям сделанным при математическом описании.
4. Классификация режимов. Требования к режимам. Общие понятия о параллельной работе электрических машин.
Режим электрической системы может быть установившимся или переходным.
В установившемся режиме параметры электрической системы непрерывно меняются, но эти изменения происходят около некоторого среднего значения, и поэтому режим можно считать установившимся .
Виды режимов системы:
1) Нормальный установившейся режим, применительно к ним проектир. энергет. сист. и техно-эконом. показат.
2) Норм переходн режим – режим в течении которого система переходит из одного установ режима в другой.
3) Аварийный установившийся и переходной режим. Для которого определяются технические характеристики, связанные с необходимостью ликвидации аварий и выяснений условий дальнейшей работоспособности.
4) Послеаварийный режим – установившейся режим технико-экономические показатели которого хуже нормально устаноновившегося режима.
Требования предъявляемые к режимам:
1) качество потребляемой электроэнергии
2) надежность энергоснабжения потребителей, без перерыва и снижения качества
3) живучесть – способность противостоять воздействию внешних сил и длительное время сохранять это состояние.
4) экономичность
Под параллельной работой нескольких трансформаторов понимается такая работа, когда их вторичные обмотки подключены к общей нагрузки, а первичные обмотки получают питание от одной сети. Параллельная работа находит широкое применение в электрических системах. При параллельной трансформатора следует стремится к тому, что бы каждый из них был нагружен токами, пропорциональными их номинальным мощностям. Для этого необходимо, что бы трансформаторы, включаемые на параллельную работу, имели равные первичные и вторичные номинальные напряжения, а как следствия и одинаковые коэффициенты трансформации, одинаковые группы соединения обмоток, одинаковые напряжения КЗ , ΔPкз→min.
Параллельная работа генераторов постоянного тока
Под параллельной работой понимается работа нескольких генераторов на общую нагрузку. Необходимость в параллельной работе возникает при переменном характере нагрузки, когда она меняется в течении суток или времени года, и для повышения надежности питания.
Должны выполнятся условия:
│Eгm│= │Umc│
ωг= ωс (fг=fc)
φг = φс + π
5.Математическое моделирование переходных процессов. Схемы замещения и структурные схемы.
Во время переходных процессов происходит изменение ЭДС, токов, напряжений, угловых скоростей роторов и механических моментов вращающихся маши. Одновременно изменяются уровни энергии, запасенной во всех электрических и механических элементах систем. Для проведения исследования этих процессов, которые протекают в реальности, и необходимо создать модели.
Математическая модель представляется системой дифференциальных уравнений, обычно упрощенных по сравнению с теми которые входят или должны были бы входить в общую модель.
Схемы замещения.
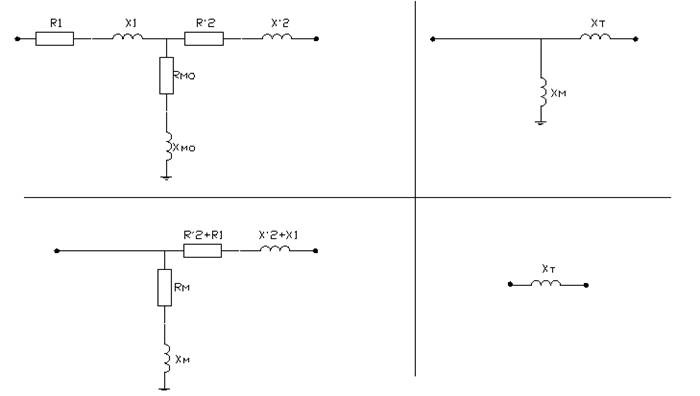
1) ЛЭП, кабельные линии
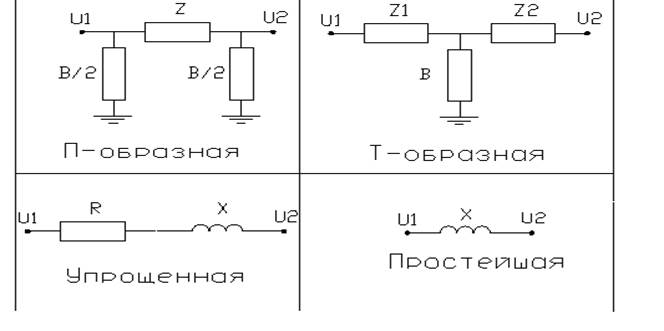
Могут замещаться Т-образной или П- образной схемой замещения. В – емкостная проводимость линии, См/км
Для упрощения можно схему замещения из R и Х. Если Х в 3 и более раза больше R то можно простейшую схему.
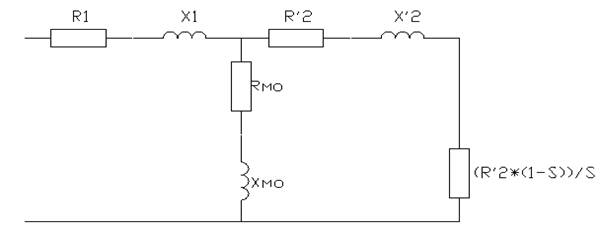
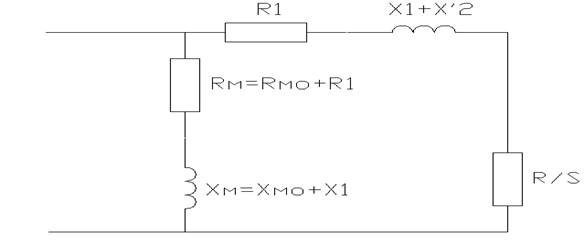
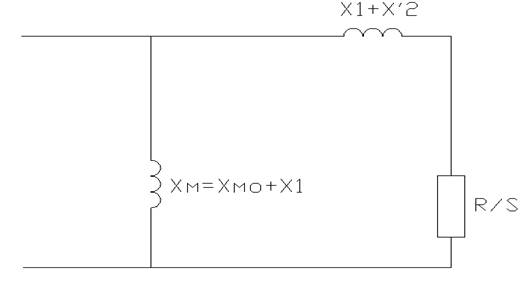
2) Асинхронные двигатели
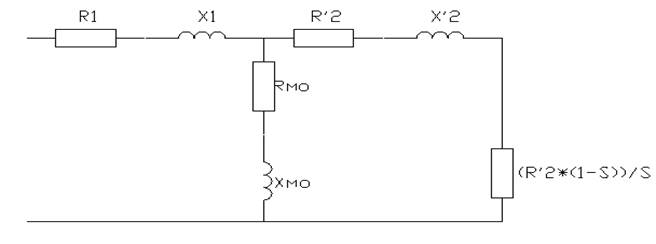
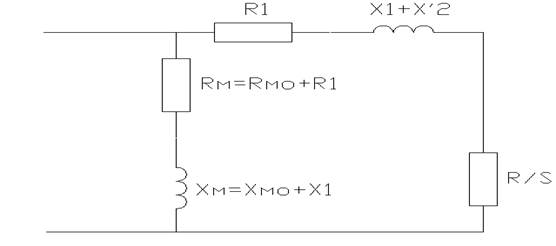
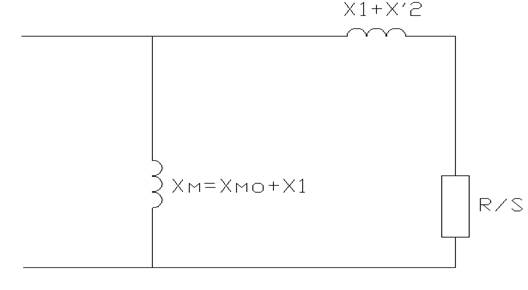
Применение той или иной схемы зависит от требуемой точности. Чаще всего применяют Г-образную схему (вторая по счету)
3) Трансформатор
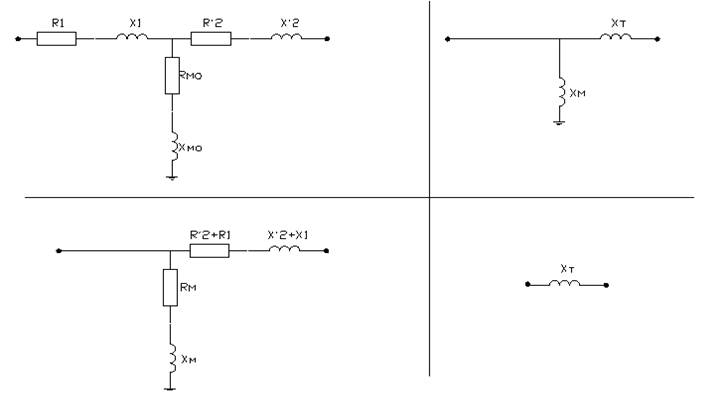
Как правило одним сопротивлением X.
4)Нагрузка
В некоторых случаях нагрузка учитывается в виде асинхронного двигателя (Г-образная схема). Иногда применяется обобщенная нагрузка, и нагрузка замещается статическими характеристиками Pн = f(U) и Qн = f(U) .В некоторых случаях применят динамические характеристики нагрузки.
Структурные схемы.
В ряде случаев при изучении ПП и устойчивости целесообразно представлять изучаемую электрическую систему в виде функциональной структурной схемы, на которой показаны основные физические элементы и связи между ними. Такая регулируемая система включает как механические элементы - первичный двигатель, автоматический регулятор скорости и т.д., так и электрические элементы – генератор, его автоматический регулятор возбуждения и систему возбуждения, передающую систему, нагрузку.
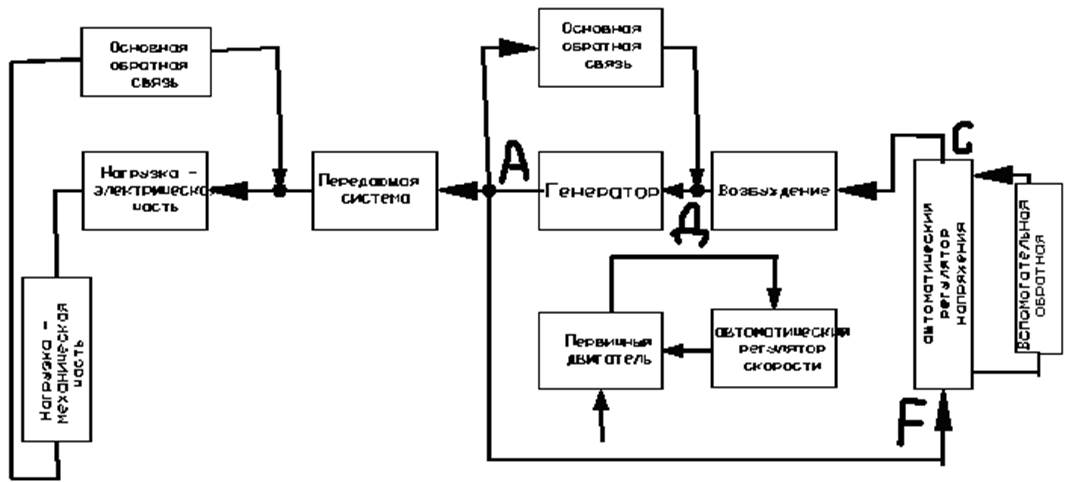
Прямые связи между основными элементами, передающие рабочий поток энергии системы. Обратная связи – дают на входе элемента некоторую дополнительную энергию. Основная силовая обратная связь (АД) проявляется в непосредственном влиянии нагрузки на элементы, генерирующие и потребляющие электроэнергию. Обратная связь (цепь АFC) осуществляется регулирующими устройствами. Вспомогательная обратная связь действует только внутри регулирующих устройств и служит для стабилизации их работы .
6.Математические модели линий электропередачи, трансформаторов, нагрузок, регулирующих устройств в расчетах ПП.
Математическая модель представляется системой дифференциальных уравнений, обычно упрощенных по сравнению с теми которые входят или должны были бы входить в общую модель.
Моделирование линий электропередачи, трансформаторов, нагрузок осуществляется путем замены реальных объектов схемами замещения с параметрами схемы замещения, которые и используются в расчетах.
1) ЛЭП, кабельные линии
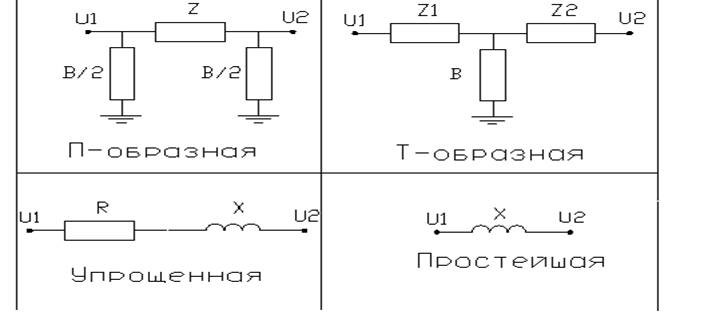
Могут замещаться Т-образной или П- образной схемой замещения. В – емкостная проводимость линии, См/км
Для упрощения можно схему замещения из R и Х. Если Х в 3 и более раза больше R то можно простейшую схему.
2) Асинхронные двигатели
Применение той или иной схемы зависит от требуемой точности. Чаще всего применяют Г-образную схему (вторая по счету)
3) Трансформатор
Как правило одним сопротивлением X.
4)Нагрузка
В некоторых случаях нагрузка учитывается в виде асинхронного двигателя (Г-образная схема). Иногда применяется обобщенная нагрузка, и нагрузка замещается статическими характеристиками Pн = f(U) и Qн = f(U) .В некоторых случаях применят динамические характеристики нагрузки.
Что касается регуляторов то это просто пиздец. Их нигде нет.
Единственное что удалось найти это виды регуляторов: АРВ (автоматический регулятор напряжения), АРЧВ (автоматический регулятор частоты вращения) регулирует путем воздействия на впуск пара, АРЧ (регулятор частоты)
Функциональная схема регулятора
7.Моделирование синхронных машин в расчетах устойчивости
Переходное индуктивное сопротивление СМ
Хd = Xl + Xad
Где
Xl – сопротивление основному магнитному потоку (рассеивание статора)
Xad – сопротивление магнитному потоку ротора
Кроме основных потоков, существует поток рассеивания якоря сцепленный только с ОВ
При возникновении КЗ общий магнитный поток остается постоянным. При качаниях генератора наличие демпферной обмотки не учитывается, т.к. токи, возникшие в обмотке запуск. В сотые доли секунд, а пределом исследования динамической устойчивости является период времени от 0 до 2 секунд.
Общий магнитный поток машины уменьшается по экспоненте с течением времени.
В обмотках статора появляются 2 составляющие тока: апериодическая и периодическая.
Апериодическая быстро затухает и не оказывает заметного влияния на потокосцепление машины. Рассматривается только периодическая составляющая.
При возникновении КЗ в ОВ появляется магнитный поток, компенсирующий реакцию якоря, и как следствие возникает дополнительное сопротивление ПП (переходное сопротивление генератора)
Хd’(переходное сопротивление по продольной оси) = Xδ(статора)
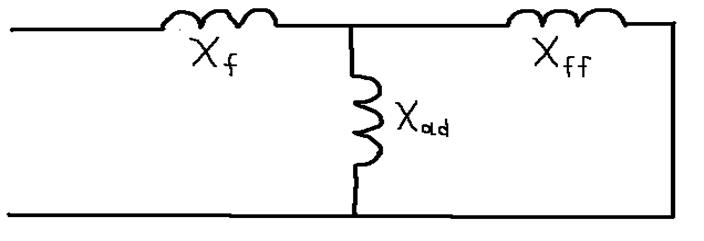
Если более точно учесть поток реакции якоря:

Где
Xfl – сопротивление рассеивания магнитного потока ротора
Схема замещения генератора в режиме КЗ аналогична схеме замещения трансформатора в режиме КЗ.
Рассмотрим изменение тока генератора и Хd в различных системах возбуждения при КЗ
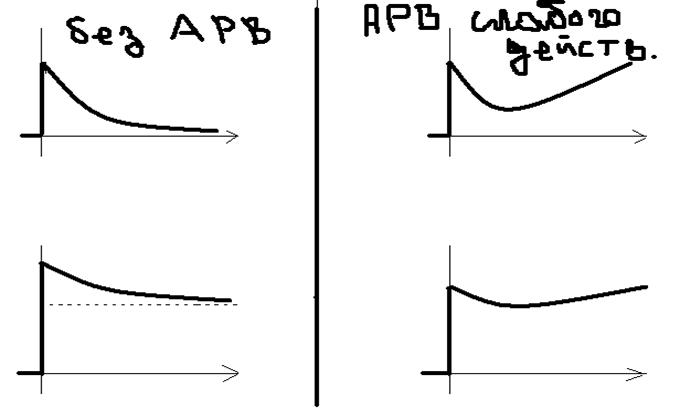
Если пренебречь активным сопротивлением у генератора, работающего на ХХ ток КЗ отстает на 90° от ЭДС генератора Еq’
Вектор тока совпадает с продольной осью генератора
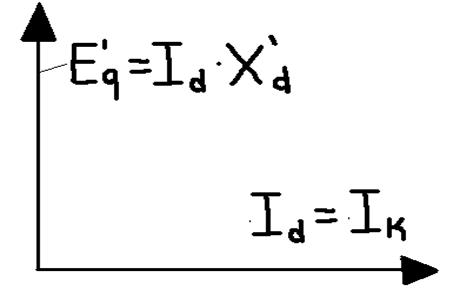
В ПП изменяется как продольная так и поперечная составляющая тока. Токи возникающие в стали ротора затухают сравнительно медленнее чем в демпферной обмотке, но быстрее чем в ОВ. Т.о. в ПП Еq’ , сопротивления Хd’ и Хq’ . Такая схема замещения пригодна не только в случаях изменения тока статора, но и при изменении частоты вращения ротора и изменении δ
8.Применение собственных и взаимных проводимостей и сопротивлений в расчетах устойчивости. Определение токов и мощностей.