
Задание: разработать микропроцессорную систему управления для «Тиристорный регулятор напряжения – асинхронный двигатель» с имитацией выхода из строя одного тиристора.








ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Дисциплина: Микропроцессорные средства в электроприводе
Вариант А1-16
1. Теоретическая часть
Структура адресного пространства микропроцессорной системы
2. Практическая часть
Тема: Разработка микропроцессорного управления для системы «Тиристорный регулятор напряжения – асинхронный двигатель»
Исходные данные:
Асинхронный двигатель: АИР355S8У3
Задание: разработать микропроцессорную систему управления для «Тиристорный регулятор напряжения – асинхронный двигатель» с имитацией выхода из строя одного тиристора.
Пояснения: Принципиальная схема системы «Тиристорный регулятор напряжения – асинхронный двигатель» (ТРН-АД) представлена на рис. 1. Тиристорный преобразователь (VS1 – VS6) предназначен для плавного пуска асинхронного двигателя. Питание к преобразователю подводиться трехфазное переменное 380 В 50 Гц (RST). Графики, поясняющие работу системы ТРН-АД представлены на рис. 2.
Рис. 1 Рис. 2
Силовую схему электропривода: тиристорный преобразователь и асинхронный двигатель необходимо собрать в программе Matlab, используя готовые библиотечные блоки. Микроконтроллер (МК) имитируется с помощью блока S-function. Необходимо разработать алгоритм управления тиристорами VS1 – VS6, написать его в виде кода (программы) и внести в S-function. Период дискретизации программы рекомендуется выбрать как 1/18000 с, для получения периода питающего напряжения в 360 точек (360 эл. град).
1. Теоретическая часть. Структура адресного пространства микропроцессорной системы
Адресное пространство МПС является одним из элементов ее архитектуры.
В адресном пространстве современных МПС выделяют четыре основных типа пространств:
· пространство для хранения программ CSEG - Code Segment;
· пространство для хранения данных DSEG - Data Segment;
· специальное пространство данных небольшого объема, так называемый набор программно доступных регистров RSEG - Register Segment;
· пространство ввода-вывода IOSEG - Input/Output Segment.
В случае, если для хранения программ и данных используется одно пространство памяти и нет никаких признаков, указывающих на тип хранимой в ячейке памяти информации, то такую МПС называют системой с Неймановской архитектурой. По такой архитектуре построено большинство современных ПЭВМ.
Альтернативную организацию памяти имеют однокристальные микроконтроллеры, в которых память данных (DSEG) и память программ (СSEG) разделены и имеют свои собственные адресные пространства и способы доступа к ним. В этом случае говорят, что МПС имеет архитектуру Гарвардской лаборатории.
В отличие от СSEG и DSEG, регистровая область памяти (набор программно-доступных регистров) -RSEG, располагается внутри МП, что обеспечивает быстрый доступ к информации, хранящейся в ней. Все современные МПС имеют регистровую область памяти, независимо от того принадлежат ли они к Неймановскому или Гарвардскому типам.
Пространство ввода/вывода IОSEG, представляющее собой набор адресов буферных схем и регистров (портов), через которые осуществляется обмен информацией с внешними устройствами, может быть изолировано от пространства данных DSEG, либо размещено в нем. В первом случае имеет место изолированный ввод/вывод, во втором - совмещенный. Типовые организации памяти и пространства ввода/вывода показаны на рис.6.2. Стрелкой показан процесс изоляции отдельных областей, приводящий к появлению нового типового набора. Все наборы существуют реально, каждый тип организации имеет свои преимущества и недостатки, учет которых позволяет создавать высокоэффективные системы различного применения.
Нумерация элементов адресного пространства производится снизу вверх в шестнадцатеричной системе счисления.
Адресное пространство определяет число возможных отличных друг от друга кодовых комбинаций (адресов), которые может выдать на шину АВ микропроцессор, поэтому его можно сравнить с пуcтым, или частично заполненным помещением библиотеки, в котором можно разместить не более 64 к книг, в случае m=16.
Представление адресного пространства в виде числовой оси позволяет наглядно отображать размещение в нем различных программно-доступных объектов. Пример распределения адресного пространства показан на рисунке 1.1
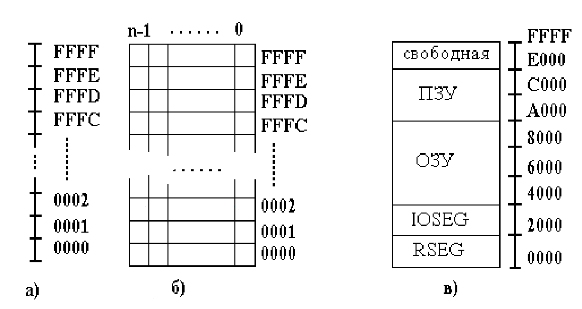
Рисунок 1.1
2. Практическая часть
2.1 Расчет схемы замещения двигателя
Для того, чтобы моделировать поведение двигателя при пуске, необходимо определить параметры эквивалентной схемы. Вычисляем их на основании справочных данных.
Технические характеристики двигателя АИР355S8У3:
· Мощность Pn = 132 кВт
· Рабочее напряжение 380/660 В
· Синхронная частота вращения f =750 об/мин
· Номинальное скольжение sn =0,013
· Критическое скольжение sк =0,05
· КПД 𝜂n=93,5%
· Cos φ = 0.82
· Номинальный момент Mn= 532,4 Нм
· Номинальный ток статора Isn = 261A
· Отношение пускового момента к номинальному моменту 
· Отношение пускового тока к номинальному току
· Отношение максимального момента к номинальному моменту 
· Динамический момент инерции ротора 9 кг*м2
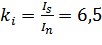
В качестве модели двигателя используем Т-образную схему (рис.1.1)
Рис. 2.1 Схема замещения асинхронного двигателя
Используя справочные данные, рассчитаем элементы схемы замещения.
Номинальный ток статора двигателя:

Ток статора двигателя при частичной загрузке:

где p* - степень загрузки двигателя, для которого средние значения cos(φ) и КПД определяются по [1, стр. 70].
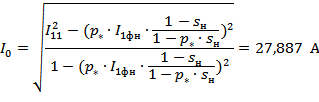
Ток холостого хода асинхронного двигателя I0:
Коэффициент, характеризующий соотношение активных сопротивлений статора и ротора – β, значение которого находится в диапазоне 0,6 ÷ 2,5. В первом приближении примем β = 1.
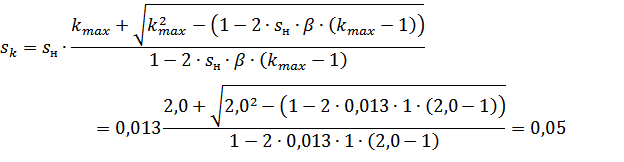
Из формулы Клосса определим соотношение для расчета критического скольжения:
Приведенное к обмотке статора активное сопротивление обмотки ротора в номинальном режиме:
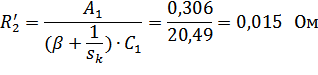
где С1 и А1 – коэффициенты, вычисляемые по формулам:


где m = 3 – число фаз.
Активное сопротивление обмотки статора в номинальном режиме:

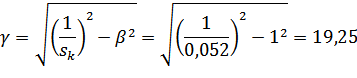
Индуктивное сопротивление короткого замыкания в номинальном режиме:

где γ – коэффициент, характеризующий соотношение индуктивного сопротивления короткого замыкания и приведенного активного сопротивления ротора.
Индуктивное сопротивление рассеяния обмотки статора в номинальном режиме:

Приведенное к обмотке статора индуктивное сопротивление рассеяния обмотки ротора в номинальном режиме:

По найденным значениям С1,  и
и  определим критическое скольжение:
определим критическое скольжение:

Из расчетов видно, что sk и sk 1 равны, а значит корректировка первоначального значения β не требуется.
Индуктивное сопротивление контура намагничивания (главное индуктивное сопротивление):
где  – ЭДС ветви намагничивания, наведенная потоком воздушного зазора (главным полем), в номинальном режиме.
– ЭДС ветви намагничивания, наведенная потоком воздушного зазора (главным полем), в номинальном режиме.
2.2 Построение модели тиристорного преобразователя
Выполним построение модели в программной среде MathLab – Simulinc. Создаем новую модель, переносим в окно модели блоки из библиотеки Simulinc.
· источник питания: SimPowerSystems→Electrical Sources→AC Voltage Source
· нагрузка: SimPowerSystems→Elements→Series RLC Branch
· земля: SimPowerSystems→Elements→Ground
· вольтметр: SimPowerSystems→ Measurements→Voltage Measurement · осциллограф: Simulink →Sinks→Scope
Вначале моделируем управление одной фазой напряжения, подаваемого на электродвигатель. Выбираем источник синусоидального напряжения, устанавливаем частоту 50 Гц.
В блоке AC Voltage Source выставим амплитудное напряжение Peak amplitude (V) равное sqrt(2)*220 ( ≈ 311 В).
Нагрузку настраиваем: выбираем активное сопротивление, указываем величину сопротивления 50 Ом.
Настройка времени симуляции. При частоте напряжения питания 50 Гц один период синусоиды составляет 0,02 с, т.е. для моделирования трех периодов выставим длительность моделирования 0,06 с. Это время вписано в окно Simulation stop time.
Запускаем процесс компиляции. После его завершения щелкаем по значку осциллографа и наблюдаем сигнал, поступающий на нагрузку (рис.2.1)
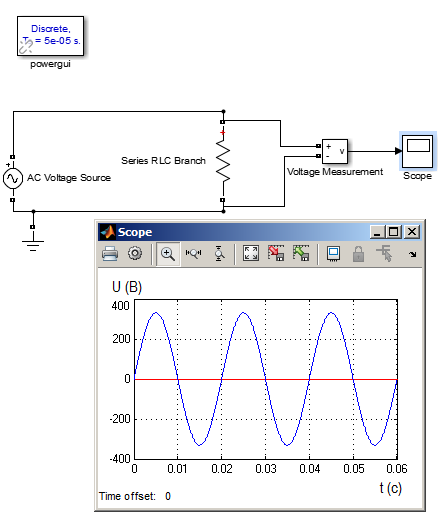
Рис.2.1 Создание модели в Simulinc
Для того, чтобы регулировать напряжение, дополнительно вводим блоки.
Генератор импульсов:
Simulink →Sources→Pulse Generator
Блок mux:
Simulink →Signal Routing→Mux ·
Два тиристора:
SimPowerSystems →Power Electronics→Detailed Thyristor
Блок Mux используем для отображения нескольких графиков в одних осях. В настройках тиристоров убираем галочку Show measurement port – это соответствует отключению измерительного выхода.
Тиристоры включаем встречно-параллельно между источником и нагрузкой, используя выводы анод a и катод k. Схема представлена на рис.2.2.
Генератор импульсов настраиваем, окно настроек на рис.2.3
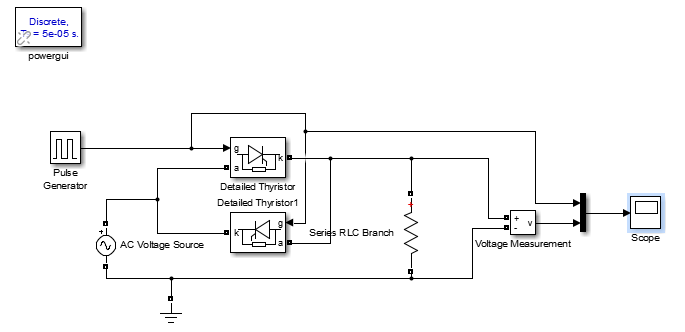
Рис.2.2 Схема управления однофазным напряжением посредством тиристорного преобразователя.
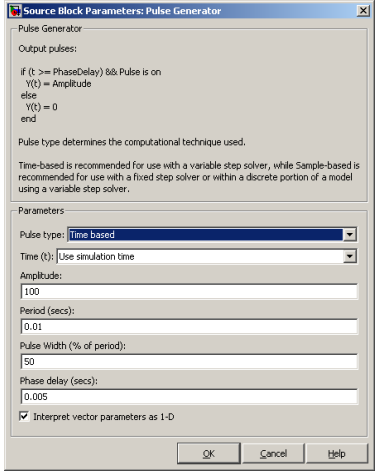
Рис.2.3 Настройки генератора импульсов
Меняем фазу включения управляющих импульсов, наблюдаем напряжение на нагрузке
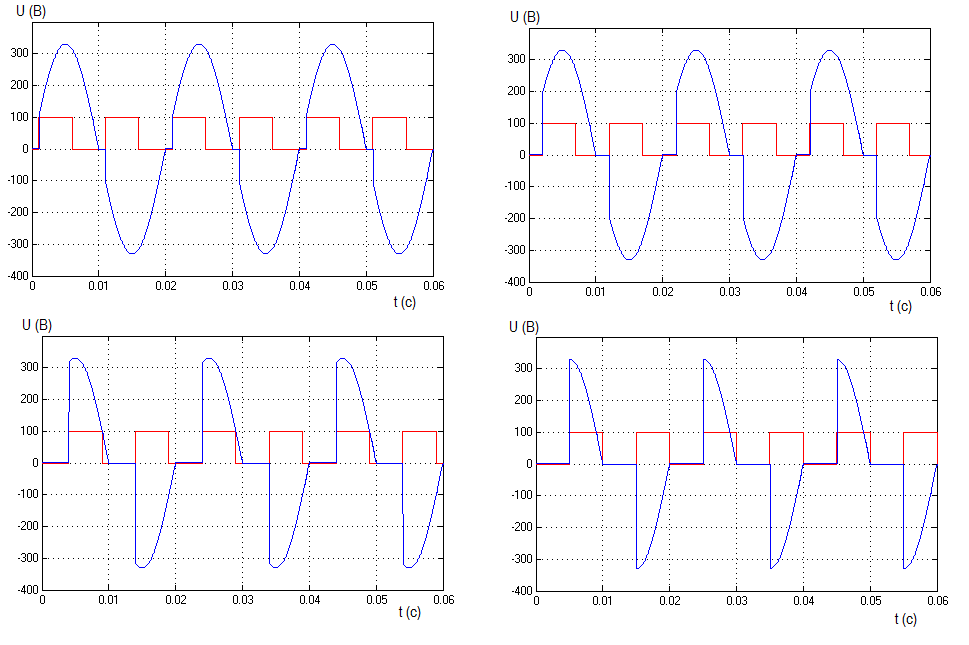
Рис. 2.4. Графики напряжения на нагрузке и управляющих импульсов
2.3 Создание алгоритма управления тиристорным преобразователем.
Для возможности создания своего алгоритма управления тиристорным преобразователем необходимо воспользоваться блоком
S-function Builder, который находится в библиотеке:
S-функция: Simulink →User-Defined Functions→S-function Builder
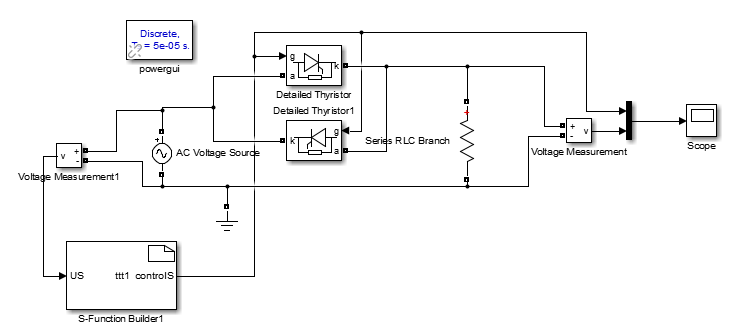
Рис.2.5 Схема для управления однофазным напряжением посредством тиристорного преобразователя с микропроцессорным управлением.
Для создания модели управляющего устройства воспользуемся блоком построения S функций – S-function builder. Этот блок предназначен для программирования пользовательских функций, имитирующих широкий спектр работы функциональных устройств.
Программа для управления однофазным преобразователем:
//объявление переменных
unsigned static pilaS = 0 alpha = 120;
int static prevUS 0;
//создание бесконечно-нарастающего сигнала с шагом й
pilaS++;
//алгоритм нахождения переходов через ноль
if (((prevUS <= 0) && (US[0] > 0)) || ((prevUS >= 0) && (US[0] < 0)))
pilaS = 0;
//запоминаем текущее значение напряжения
prevUS = US[0];
//создаем импульс управления
if ((pilaS >= alpha) && (pilaS <= 160))
controlS[0] = 100;
else controlS[0] = 0;
Включив функционирование системы, на экране осциллографа наблюдаем сигнал при фазе угла управления 120°:
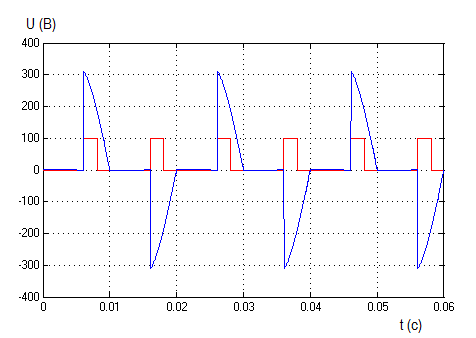
Рис.2.6 Однофазное переменное напряжение, регулируемое тиристорным преобразователем.
2.4 Создание трехфазного ТРН
Для создания трехфазного тиристорного регулятора напряжения соберем схему, изображенную на рис.2.1
Расширим модель тиристорного управления асинхронным двигателем , построим модель источника трехфазного напряжения (рис.2.2). Для этой модели требуется S-function builder с тремя входами и темя выходами, это требует соответствующего конфигурирования (рис.2.3).
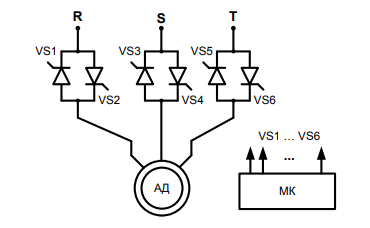
Рис.2.1 Трехфазный тиристорный регулятор напряжения – асинхронный двигатель
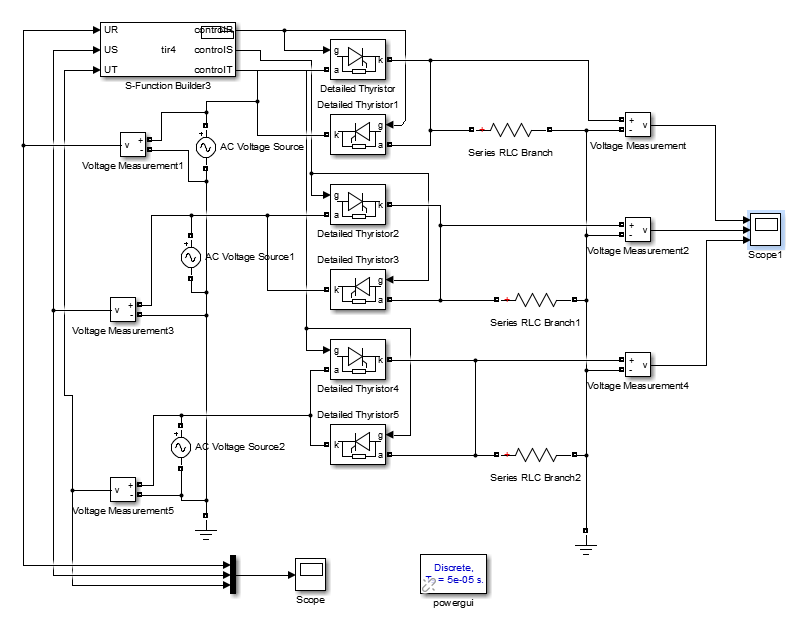
Рис. 2.7 Модель тиристорного регулятора, управляющего трехфазным напряжением
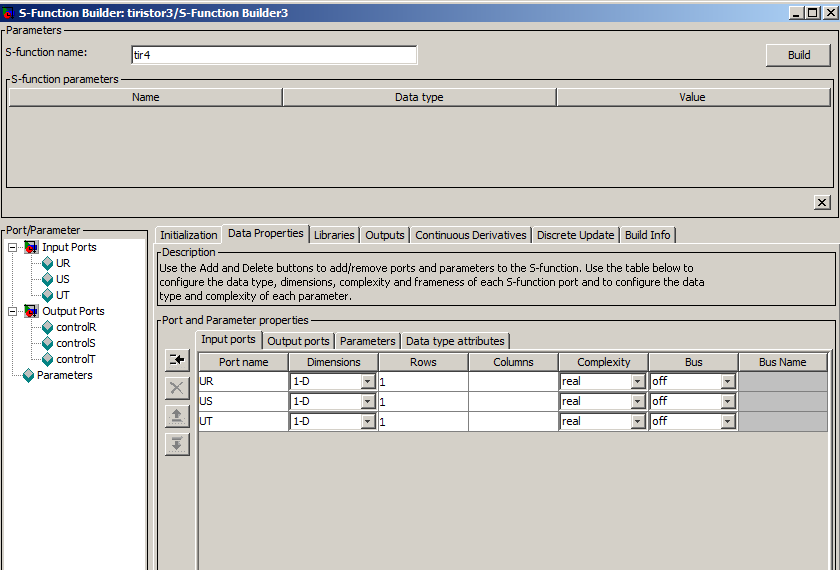
Рис.2.8 Конфигурирование S-function builder
Текст программы для трехфазного регулирования:
//объявление переменных
unsigned static pilaS = 0, pilaR = 0, pilaT = 0, alpha = 30;
int static prevUS = 0, prevUR = 0, prevUT = 0;
//создание бесконечно-нарастающего сигнала с шагом й
pilaS++;
pilaR++;
pilaT++;
//алгоритм нахождения переходов через ноль
if (((prevUS <= 0) && (US[0] > 0)) || ((prevUS >= 0) && (US[0] < 0)))
pilaS = 0;
if (((prevUR <= 0) && (UR[0] > 0)) || ((prevUR >= 0) && (UR[0] < 0)))
pilaR = 0;
if (((prevUT <= 0) && (UT[0] > 0)) || ((prevUT >= 0) && (UT[0] < 0)))
pilaT = 0;
//запоминаем текущее значение напряжения
prevUS = US[0];
prevUR = UR[0];
prevUT = UT[0];
//создаем импульс управления
if ((pilaS >= alpha) && (pilaS <= 160))
controlS[0] = 100;
else controlS[0] = 0;
if ((pilaR >= alpha) && (pilaR <= 160))
controlR[0] = 100;
else controlR[0] = 0;
if ((pilaT >= alpha) && (pilaT <= 160))
controlT[0] = 100;
else controlT[0] = 0;
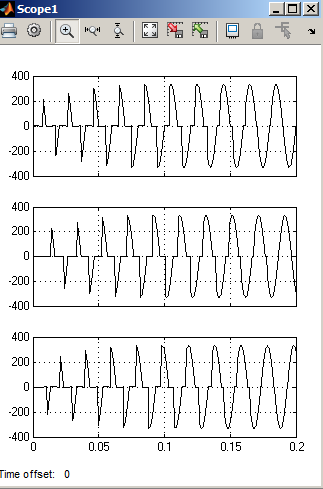
Запустив программу, получаем осциллограмму управления тремя фазами напряжения
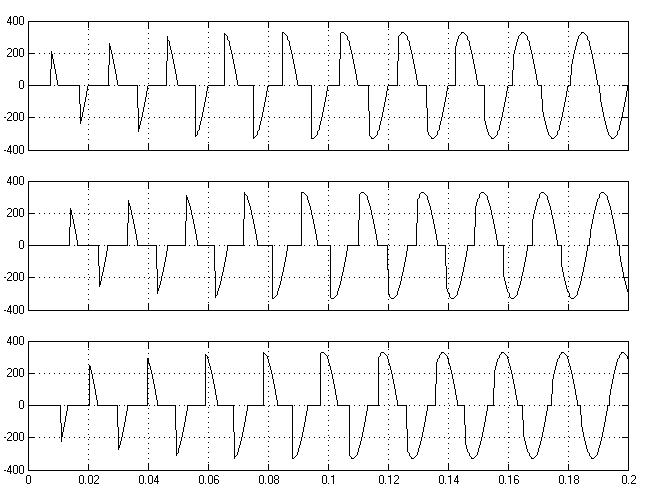
Рис.2.9 Управление трехфазным напряжением
3. Моделирование переходных процессов при пуске асинхронного двигателя
Для сравнения прямого и плавного пуска асинхронного двигателя сформируем модели этих процессов в среде Simulink. При построении моделей используем справочные данные асинхронного двигателя, соответствующего техническому заданию, и рассчитанные параметры схемы замещения:
Технические характеристики двигателя 4А250М6У3:
· Мощность Pn = 132 кВт
· Рабочее напряжение 380/660 В
· Синхронная частота вращения f =750 об/мин
· Номинальное скольжение sn =0,013
· Критическое скольжение sк =0,05
· КПД 𝜂n=93,5%
· Cos φ = 0.82
· Номинальный момент Mn= 168,1 Нм
· Номинальный ток статора Isn = 231,7A
· Отношение пускового момента к номинальному моменту
· Отношение пускового тока к номинальному току
· Отношение максимального момента к номинальному моменту
· Динамический момент инерции ротора 9 кг*м2
· Параметры схемы замещения: сопротивление статора
rs = 0.038Ом
· Приведенное сопротивление ротора rr = 0.037Ом
· Реактивное сопротивление статора  Ом
Ом
· Реактивное сопротивление ротора 
· Индуктивное сопротивление намагничивания Хμ=12,539
3.1 Сборка схемы прямого пуска.
Для сбора схемы на рис. 1.1 разместим в окне модели блоки:
· асинхронный двигатель:
SimPowerSystems → Machines → Asynchronous Machine SI Units
· Bus Selector:
Simulink → Signal Routing → Bus Selector
Фазные обмотки статора подключим к сети переменного тока RST.
Параметры асинхронного двигателя укажем в окне настроек (рис. 1.2).
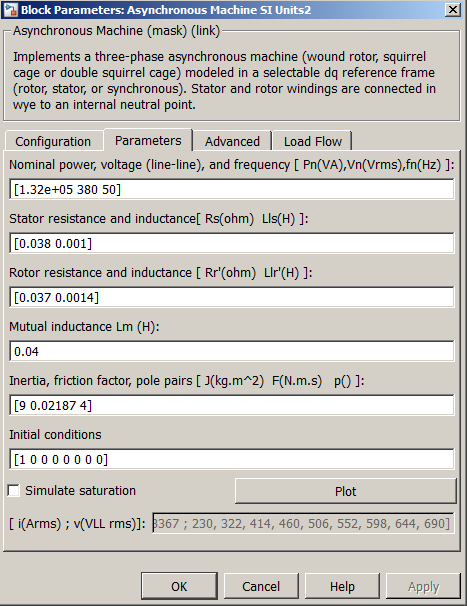
Рис. 1.2 Параметры двигателя
Во вкладке Configuration выбираем тип ротора (Rotor type) – короткозамкнутый (Squirrel cage). Во вкладке Parameters - параметры схемы замещения асинхронного двигателя, марка которого дана в техническом задании.
Модель асинхронного двигателя объединим с моделью тиристорного регулятора напряжения.
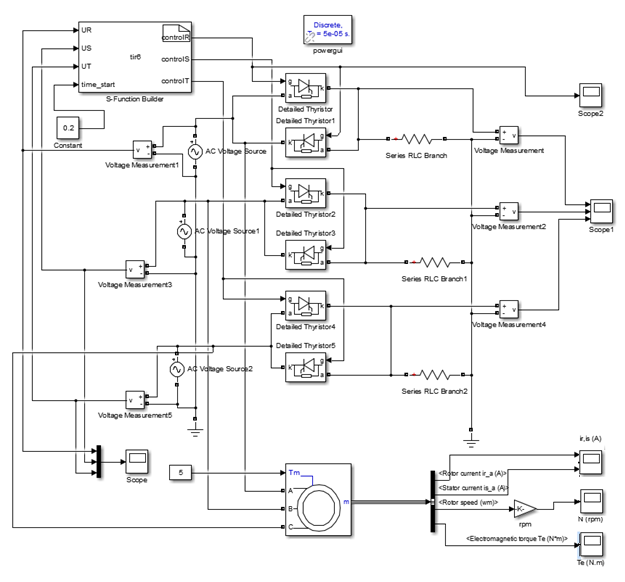
Рис.3.1 Модель системы асинхронный двигатель – тиристорный преобразователь, включение в режиме прямого пуска
3.2 Модель системы асинхронный двигатель –тиристорный преобразователь
Для того чтобы напряжение постепенно нарастало, угол включения должен плавно меняться. Это достигается добавлением в программу S-Function дополнительного кода:
//объявление переменных
unsigned static pilaS = 0, pilaR = 0, pilaT = 0, alpha = 160, timer_st = 0;
int static prevUS = 0, prevUR = 0, prevUT = 0;
//плавное изменение напряжения
if (timer_st++ > (18000*time_start[0]/150))
{
alpha--;
timer_st=0;
}
if (alpha > 160) alpha = 160;
if (alpha < 10) alpha = 10;
Кофигурация S блока пополнена дополнительным входным портом time_start для управления временем плавного нарастания напряжения.
В результате получаем действующую модель с плавным нарастанием трехфазного напряжения (рис. 2.1)
3.2 Плавное изменение угла управления
Соединим клеммы асинхронного двигателя с выходоми тиристорного регулятора.
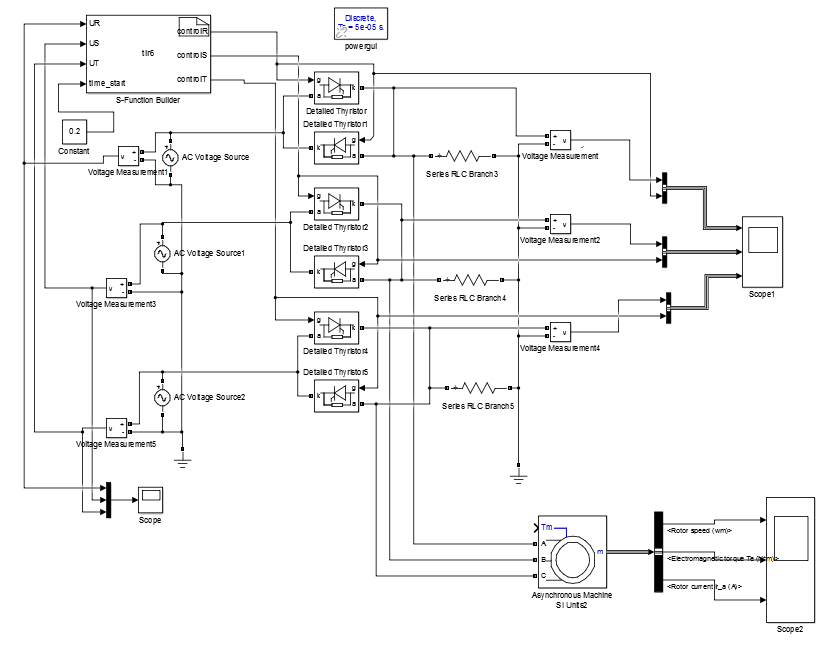
Рис.3.3 Модель тиристорного управления плавным пуском
Сравним осциллограммы прямого пуска и плавного пуска двигателя. Переходные процессы показаны на рис. 2.3 и 2.4
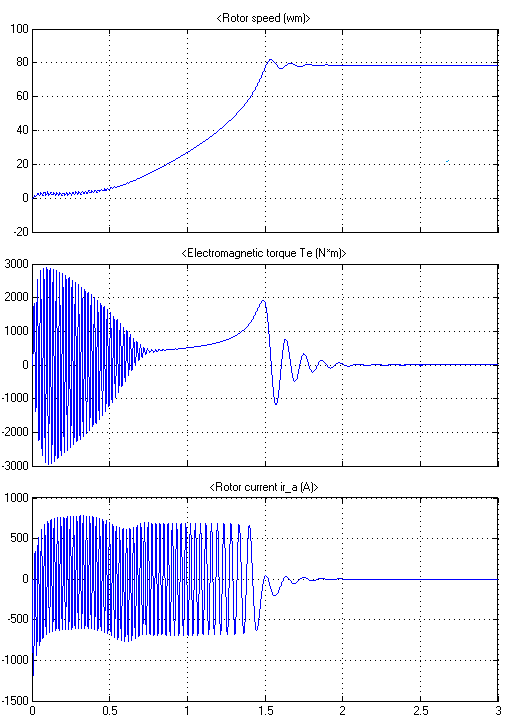
Рис. 3.4 Переходные процессы при прямом пуске двигателя
При прямом пуске наблюдаются мощные и длительные колебания, амплитуда которых близка к критическому значению.
Рассмотрим модель плавного пуска, при подаче управления на тиристорный преобразователь. Длительность нарастания напряжения составляет 0.2с. Начальные мощные колебания при плавном пуске полностью устраняются. Вторая волна колебаний сохраняется, но ее амплитуда находится в пределах допустимых значений.
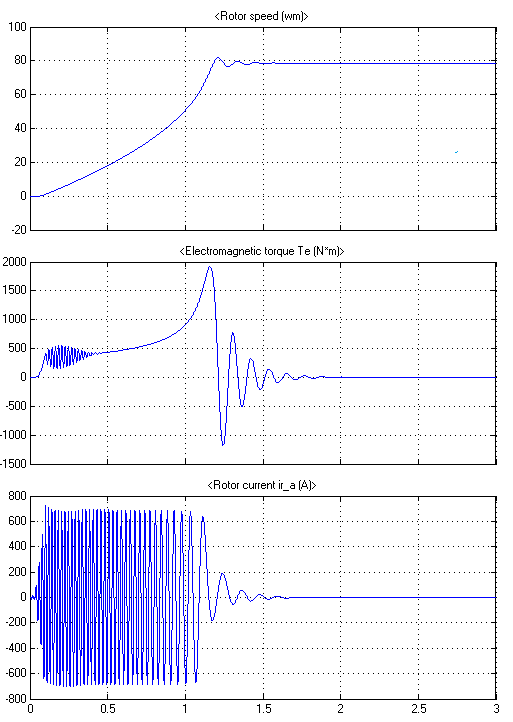
Рис.3.5 Переходные процессы момента и скорости вращения ротора при плавном пуске, время плавного пуска 0,2с
Исследование модели показывает, что тиристорный преобразователь с микропроцессорным управлением, настроенный на плавное увеличение подаваемого напряжения, значительно улучшает условия запуска асинхронного двигателя. Снижаются колебания тока, существенно уменьшаются ударные значения момента в первую секунду после включения
4. Дополнительное задание. Имитация выхода из строя одного тиристора.
Вводим управляемое отключение одного тиристора через 1,5 с после прямого пуска. Наблюдаем процессы:
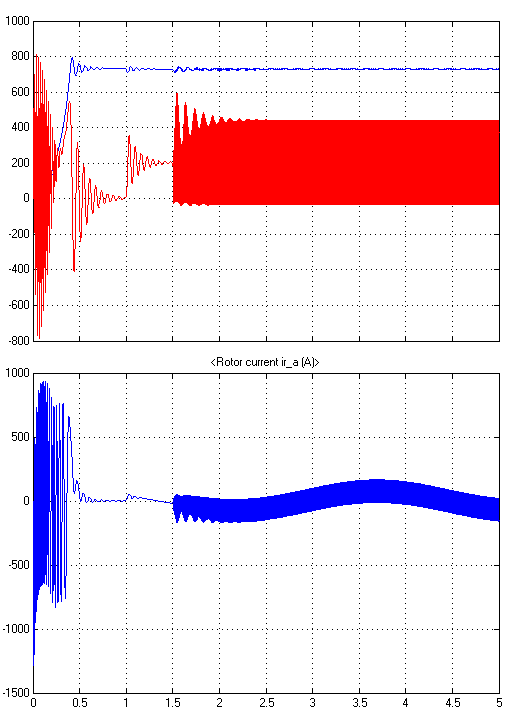
Рис.4.1 График процесса при прямом пуске с отказом тиристора через 1,5 с после включения
Защиту обеспечим посредством микропроцессорного управления, введя в программу функцию контроля величины тока. Обрыв фазы регистрируется датчиком тока и передается на программный модуль, происходит запирание всех тиристоров.
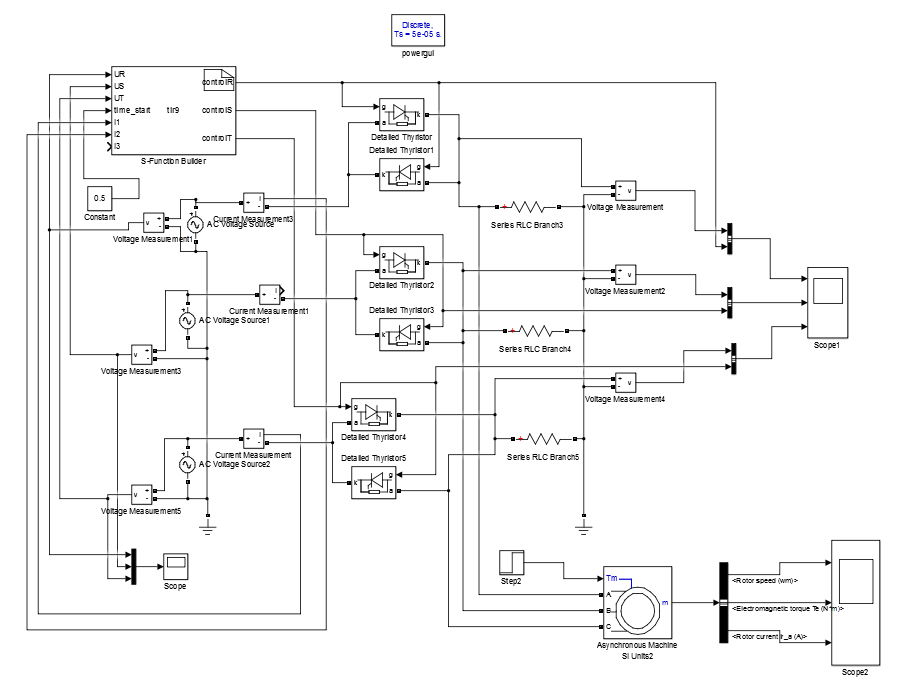
Рис.4.2 Схема с защитой от отказа тиристора
Блок S дополним портами I1, I2, I3. В программу введем переменную otcl:
//объявление переменных
unsigned static pilaS = 0, pilaR = 0, pilaT = 0, alpha = 30, otcl = 0;
int static prevUS = 0, prevUR = 0, prevUT = 0;
Введем функцию проверки значения токов в фазах
проверяем значение тока
if ((I1 < 10) && (I2 < 10) && (I3 < 10) && (otcl=1))
otcl=1;
//создаем импульс управления
if ((pilaS >= alpha) && (pilaS <= 160) && (otcl=0))
controlS[0] = 100;
else controlS[0] = 0;
if ((pilaR >= alpha) && (pilaR <= 160) && (otcl=0)))
controlR[0] = 100;
else controlR[0] = 0;
if ((pilaT >= alpha) && (pilaT <= 160) && (otcl=0)))
controlT[0] = 100;
else controlT[0] = 0;
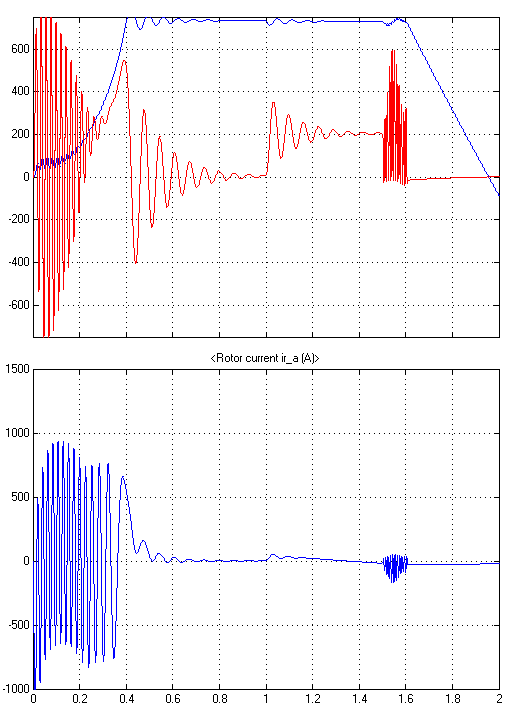
Рис. 4.3 График процесса при отказе одного тиристора и автоматическом запирании всех тиристоров
Введение защиты предупреждает разрушительные процессы в двигателе при отказе одного из тиристоров.
Выводы
В данной работе выполнено моделирование тиристорного управления асинхронным двигателем. Для создания математической модели вычислялись элементы схемы замещения двигателя. Модель двигтеля и тиристорных переключателей взяты и библиотеки Simulinc. В модель введена программная имитация микропроцессорного управления тиристорными переключателями.
В модели используются виртуальные измерительные приборы. Рассматриваются переходные процессы при прямом пуске двигателя и при плавном пуске через тиристорный преобразователь. Отмечены преимущества плавного пуска: значительно снижаются колебательные процессыц в момент включения.
Литература
1. Проектирование и исследование автоматизированных электроприводов. Ч.4. Тиристорные преобразователи для электроприводов постоянного тока: Учебное пособие / Удут Л.С., Кояин Н.В., Мальцева О.П. - Томск: Изд-во ТПУ, 2001.– 152 с.
2. Системы управления электроприводов.: учебное пособие / О.П. Мальцева, Л.С. Удут, Н.В. Кояин. – Томск: Издательство Томского политехнического университета, 2007. – 53с.
3. Алексеев К.Б., Палагута К.А. Микроконтроллерное управление электроприводом, Москва: МГИУ, 2015.-298 с.
4. Дементьев Ю.Н., Однокопылов И.Г. Микропроцессорные средства в электроприводе:Учебное пособие/ Национальный исследовательский Томский политехнический университет (ТПУ). — Томск: Изд-во ТПУ, 2015.
5. Каракулов А.С. Разработка алгоритмов управления для микропроцессорных электроприводов :лабораторный практикум / Национальный исследовательский Томский политехнический университет (ТПУ). — Томск: Изд-во ТПУ, 2010.